Please help us testing the Python3 support in the yet unreleased GRASS GIS trunk (i.e., version “grass77” which will be released as “grass78” in the near future).
Why Python 3?
Python 2 is end-of-life (EOL); the current Python 2.7 will retire in 11 months from today (see https://pythonclock.org). We want to follow the “Moving to require Python 3” and complete the change to Python 3. And we need a broader community testing.
https://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.png00Markushttps://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.pngMarkus2019-01-28 00:32:592023-12-07 13:33:49Call for testing: GRASS GIS with Python 3
Today marks 35 years of GRASS GIS development – with frequent releases the project keeps pushing the limits in terms of geospatial data processing quality and performance.
GRASS (Geographic Resources Analysis Support System) is a free and open source Geographic Information System (GIS) software suite used for geospatial data management and analysis, image processing, graphics and map production, spatial modeling, and 3D visualization. Since the major GRASS GIS 7 version, it also comes with a feature rich engine for space-time cubes useful for time series processing of Landsat and Copernicus Sentinel satellite data and more. GRASS GIS can be either used as a desktop application or as a backend for other software packages such as QGIS and R. Furthermore, it is frequently used on HPC and cloud infrastructures for massive parallelized data processing.
Brief history
In 1982, under the direction of Bill Goran at the U.S. Army Corps of Engineers Construction Engineering Research Laboratory (CERL), two GIS development efforts were undertaken. First, Lloyd Van Warren, a University of Illinois engineering student, began development on a new computer program that allowed analysis of mapped data. Second, Jim Westervelt (CERL) developed a GIS package called “LAGRID – the Landscape Architecture Gridcell analysis system” as his master’s thesis. Thirty five years ago, on 29 July 1983, the user manual for this new system titled “GIS Version 1 Reference Manual” was first published by J. Westervelt and M. O’Shea. With the technical guidance of Michael Shapiro (CERL), the software continued its development at the U.S. Army Corps of Engineers Construction Engineering Research Laboratory (USA/CERL) in Champaign, Illinois; and after further expansion version 1.0 was released in 1985 under the name Geographic Resources Analysis Support System (GRASS). The GRASS GIS community was established the same year with the first annual user meeting and the launch of GRASSnet, one of the internet’s early mailing lists. The user community expanded to a larger audience in 1991 with the “Grasshopper” mailing list and the introduction of the World Wide Web. The users’ and programmers’ mailing lists archives for these early years are still available online.
In the mid 1990s the development transferred from USA/CERL to The Open GRASS Consortium (a group who would later generalize to become today’s Open Geospatial Consortium — the OGC). The project coordination eventually shifted to the international development team made up of governmental and academic researchers and university scientists. Reflecting this shift to a project run by the users, for the users, in 1999 GRASS GIS was released under the terms of the GNU General Public License (GPL). A detailed history of GRASS GIS can be found at https://grass.osgeo.org/history/.
Where to next?
The development on GRASS GIS continues with more energy and interest than ever. Parallel to the long-term maintenance of the GRASS 7.4 stable series, effort is well underway on the new upcoming cutting-edge 7.6 release, which will bring many new features, enhancements, and cleanups. As in the past, the GRASS GIS community is open to any contribution, be it in the form of programming, documentation, testing, and financial sponsorship. Please contact us!
About GRASS GIS
The Geographic Resources Analysis Support System (https://grass.osgeo.org/), commonly referred to as GRASS GIS, is an Open Source Geographic Information System providing powerful raster, vector and geospatial processing capabilities in a single integrated software suite. GRASS GIS includes tools for spatial modeling, visualization of raster and vector data, management and analysis of geospatial data, and the processing of satellite and aerial imagery. It also provides the capability to produce sophisticated presentation graphics and hardcopy maps. GRASS GIS has been translated into about twenty languages and supports a huge array of data formats. It can be used either as a stand-alone application or as backend for other software packages such as QGIS and R geostatistics. It is distributed freely under the terms of the GNU General Public License (GPL). GRASS GIS is a founding member of the Open Source Geospatial Foundation (OSGeo).
https://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.png00Markushttps://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.pngMarkus2018-07-29 19:16:022024-11-18 13:37:04Celebrating 35 years of GRASS GIS!
We are pleased to announce the first release candidate of GRASS GIS 7.2.0
What’s new in a nutshell
This is the first release candidate of the upcoming major release GRASS GIS 7.2.0.
The new GRASS GIS 7.2.0RC1 release provides more than 1900 stability fixes and manual improvements compared to the stable releases 7.0.x.
About GRASS GIS 7: Its graphical user interface supports the user to make complex GIS operations as simple as possible. The updated Python interface to the C library permits users to create new GRASS GIS-Python modules in a simple way while yet obtaining powerful and fast modules. Furthermore, the libraries were significantly improved for speed and efficiency, along with support for huge files. A lot of effort has been invested to standardize parameter and flag names. Finally, GRASS GIS 7 comes with a series of new modules to analyse raster and vector data, along with a full temporal framework. For a detailed overview, see the list of new features. As a stable release series, 7.2.x enjoys long-term support.
The Geographic Resources Analysis Support System (https://grass.osgeo.org/), commonly referred to as GRASS GIS, is an Open Source Geographic Information System providing powerful raster, vector and geospatial processing capabilities in a single integrated software suite. GRASS GIS includes tools for spatial modeling, visualization of raster and vector data, management and analysis of geospatial data, and the processing of satellite and aerial imagery. It also provides the capability to produce sophisticated presentation graphics and hardcopy maps. GRASS GIS has been translated into about twenty languages and supports a huge array of data formats. It can be used either as a stand-alone application or as backend for other software packages such as QGIS and R geostatistics. It is distributed freely under the terms of the GNU General Public License (GPL). GRASS GIS is a founding member of the Open Source Geospatial Foundation (OSGeo).
As of 24 May 2016, a new stable release branch was created for the upcoming GRASS GIS 7.2 release. This new branch includes all the many improvements which have been implemented in the former development version 7.1.svn.
What is a branch? In simple words, it is a kind of directory in the software development server (SVN in our case) in which no more development but only bugfixing happens. From a release branch, new stable releases are created and published.
The actual branches in the GRASS GIS project are:
very old stable: releasebranch_6_4 (used for bugfixing and to publish stable GRASS GIS 6.4.x releases) – very low release frequency (started in revision r34936)
old stable releasebranch_7_0 (used for bugfixing and to publish stable GRASS GIS 7.0.x releases) – perhaps one last release upcoming (branch started in revision r59487 but development already started in Apr 2008 in r31142)
new stable releasebranch_7_2 (used for bugfixing and to publish stable GRASS GIS 7.2.x releases) – upcoming series of stable releases (branch started in revision r68500)
trunk (used for development, with pseudo-name 7.3.svn) – under heavy development
Note to SVN users
The trunk branch with pseudo-name 7.1.svn has become 7.3.svn due to the creation of the new 7.2.svn release branch. You can simply continue to update from SVN, the version will be automatically updated.
If you used to work with the 7.0.svn release branch, consider to download the new 7.2.svn release branch, either from the weekly source code snapshot (here) or from the SVN server directly (here).
About GRASS GIS
The Geographic Resources Analysis Support System (https://grass.osgeo.org/), commonly referred to as GRASS GIS, is an Open Source Geographic Information System providing powerful raster, vector and geospatial processing capabilities in a single integrated software suite. GRASS GIS includes tools for spatial modeling, visualization of raster and vector data, management and analysis of geospatial data, and the processing of satellite and aerial imagery. It also provides the capability to produce sophisticated presentation graphics and hardcopy maps. GRASS GIS has been translated into about twenty languages and supports a huge array of data formats. It can be used either as a stand-alone application or as backend for other software packages such as QGIS and R geostatistics. It is distributed freely under the terms of the GNU General Public License (GPL). GRASS GIS is a founding member of the Open Source Geospatial Foundation (OSGeo).
Sometimes, we developers get reports via mailing list that this & that would not work on whatever operating system. Now what? Should we be so kind and install the operating system in question in order to reproduce the problem? Too much work… but nowadays it has become much easier to perform such tests without having the need to install a full virtual machine – thanks to docker.
Disclaimer: I don’t know much about docker yet, so take the code below with a grain of salt!
In my case I usually work on Fedora or Scientific Linux based systems. In order to quickly (i.e. roughly 10 min of automated installation on my slow laptop) try out issues of GRASS GIS 7 on e.g., Ubuntu, I can run all my tests in docker installed on my Fedora box:
# we need to run stuff as root user
su
# Fedora 21: install docker
yum -y docker-io
# Fedora 22: install docker
dnf -y install docker
# enable service
systemctl start docker
systemctl enable docker
Now we have a running docker environment. Since we want to exchange data (e.g. GIS data) with the docker container later, we prepare a shared directory beforehand:
# we'll later map /home/neteler/data/docker_tmp to /tmp within the docker container
mkdir /home/neteler/data/docker_tmp
Now we can start to install a Ubuntu docker image (may be “any” image, here we use “Ubuntu trusty” in our example). We will share the X11 display in order to be able to use the GUI as well:
# enable X11 forwarding
xhost +local:docker
# search for available docker images
docker search trusty
# fetch docker image from internet, establish shared directory and display redirect
# and launch the container along with a shell
docker run -v /data/docker_tmp:/tmp:rw -v /tmp/.X11-unix:/tmp/.X11-unix \
-e uid=$(id -u) -e gid=$(id -g) -e DISPLAY=unix$DISPLAY \
--name grass70trusty -i -t corbinu/docker-trusty /bin/bash
In almost no time we reach the command line of this minimalistic Ubuntu container which will carry the name “grass70trusty” in our case (btw: read more about Working with Docker Images):
root@8e0f233c3d68:/#
# now we register the Ubuntu-GIS repos and get GRASS GIS 7.0
add-apt-repository ppa:ubuntugis/ubuntugis-unstable
add-apt-repository ppa:grass/grass-stable
apt-get update
apt-get install grass7
This will take a while (the remaining 9 minutes or so of the overall 10 minutes).
Since I like cursor support on the command line, I launch (again?) the bash in the container session:
root@8e0f233c3d68:/# bash
# yes, we are in Ubuntu here
root@8e0f233c3d68:/# cat /etc/issue
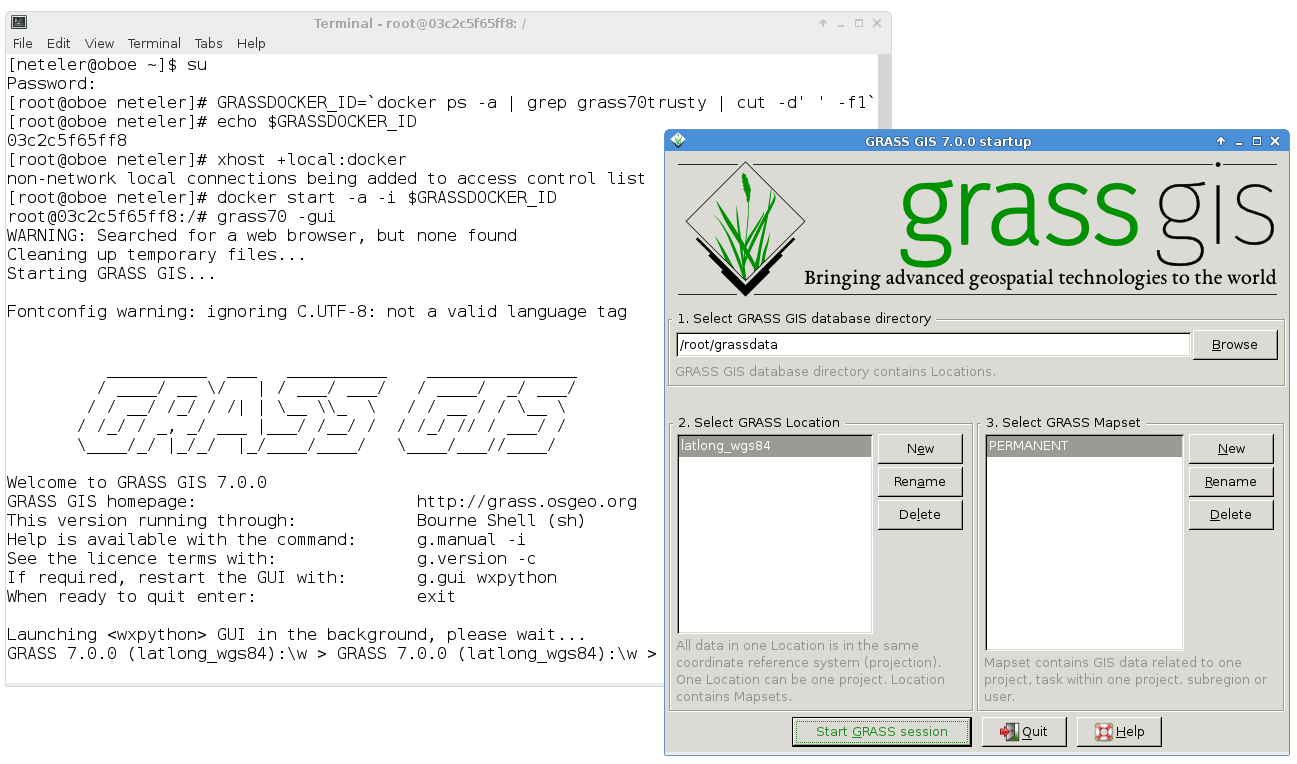
Now we can start to use GRASS GIS 7, even with its graphical user interface from inside the docker container:
# create a directory for our data, it is mapped to /home/neteler/data/docker_tmp/
# on the host machine
root@8e0f233c3d68:/# mkdir /tmp/grassdata
# create a new LatLong location from EPSG code
# (or copy a location into /home/neteler/data/docker_tmp/)
root@8e0f233c3d68:/# grass70 -c epsg:4326 ~/grassdata/latlong_wgs84
# generate some data to play with
root@8e0f233c3d68:/# v.random n=30 output=random30
# start the GUI manually (since we didn't start GRASS GIS right away with it before)
root@8e0f233c3d68:/# g.gui
Indeed, the GUI comes up as expected!
GRASS GIS 7 GUI in docker container
You may now perform all tests, bugfixes, whatever you like and leave the GRASS GIS session as usual.
To get out of the docker session:
root@8e0f233c3d68:/# exit # leave the extra bash shell
root@8e0f233c3d68:/# exit # leave docker session
# disable docker connections to the X server
[root@oboe neteler]# xhost -local:docker
To restart this session later again, you will call it with the name which we have earlier assigned:
[root@oboe neteler]# docker ps -a
# ... you should see "grass70trusty" in the output in the right column
# we are lazy and automate the start a bit
[root@oboe neteler]# GRASSDOCKER_ID=`docker ps -a | grep grass70trusty | cut -d' ' -f1`
[root@oboe neteler]# echo $GRASSDOCKER_ID
[root@oboe neteler]# xhost +local:docker
[root@oboe neteler]# docker start -a -i $GRASSDOCKER_ID
### ... and so on as described above.
https://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.png00Markushttps://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.pngMarkus2015-04-12 00:30:102023-11-11 19:07:57Fun with docker and GRASS GIS software
To get the GRASS GIS 6.4.5RC1 source code directly from SVN:
svn checkout https://svn.osgeo.org/grass/grass/tags/release_20150406_grass_6_4_5RC1/
Key improvements:
Key improvements of the GRASS GIS 6.4.5RC1 release include stability fixes (esp. vector library), some fixes for wxPython3 support, some module fixes, and more message translations.
The Geographic Resources Analysis Support System (https://grass.osgeo.org), commonly referred to as GRASS GIS, is an Open Source Geographic Information System providing powerful raster, vector and geospatial processing capabilities in a single integrated software suite. GRASS GIS includes tools for spatial modeling, visualization of raster and vector data, management and analysis of geospatial data, and the processing of satellite and aerial imagery. It also provides the capability to produce sophisticated presentation graphics and hardcopy maps. GRASS GIS has been translated into about twenty languages and supports a huge array of data formats. It can be used either as a stand-alone application or as backend for other software packages such as QGIS and R geostatistics. It is distributed freely under the terms of the GNU General Public License (GPL). GRASS GIS is a founding member of the Open Source Geospatial Foundation (OSGeo).
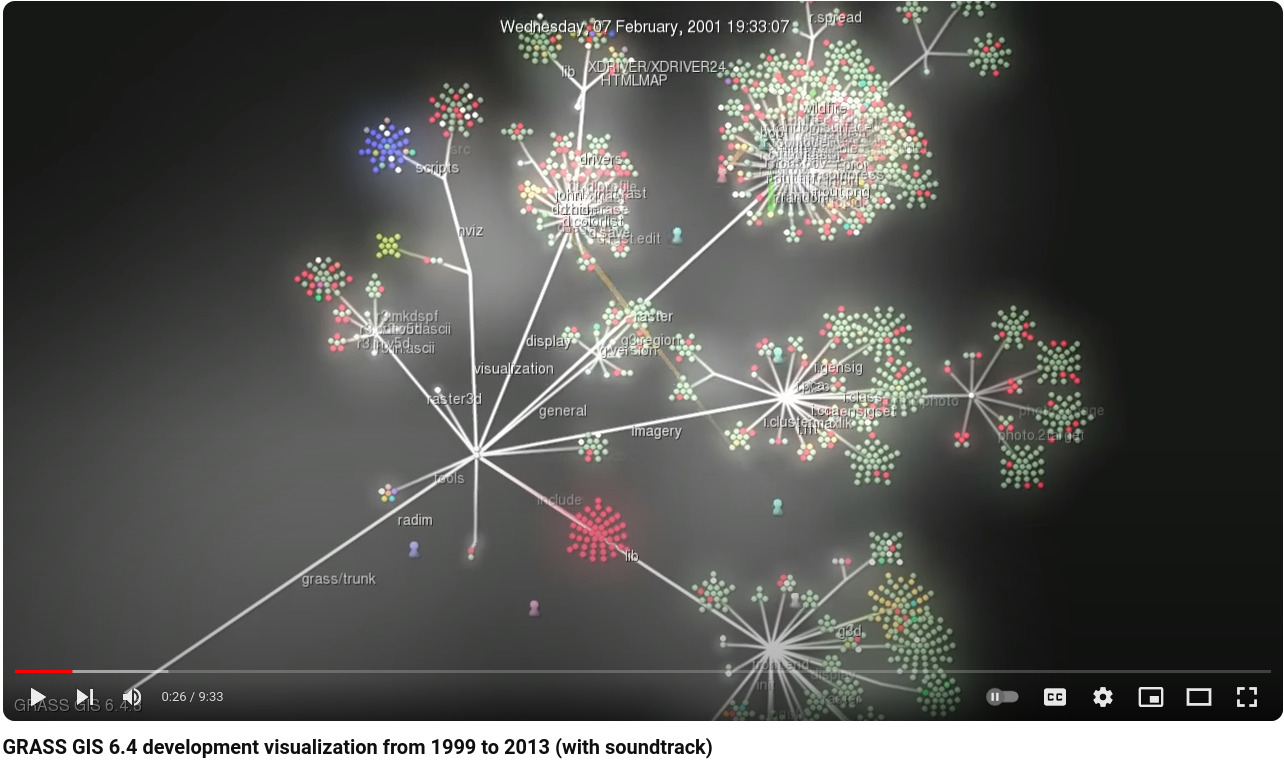
Watch how the community based GRASS GIS 6.4 software development evolved! You can see how the individual contributors modify and expand the source code – click screenshot for Youtube video:
Dec 29, 1999: GRASS GIS 5.0 is being stored in an online source code repository in December 1999…
Dec 02, 2000: The developers work on all parts of the code…
Jan 15, 2002: Working on the future GRASS GIS 5.1 release
Nov 25, 2002: Starting GRASS 5.1 development with code restructuring
Jun 14, 2004: GRASS GIS 5.7 released in June 2004
Nov 09, 2004: Source code restructuring to get a better directory layout (all other developers waiting…)
Nov 09, 2004: … thousands of files are modified in this operation …
Nov 10, 2004: All developers resume their activities after the restructuring
Jan 10, 2005: Preparing the GRASS GIS 6.0.0 release…
Apr 09, 2005: GRASS GIS 6.0.0 published, release branch being split off from trunk for easier maintenance
Feb 22, 2006: Release of GRASS GIS 6.0.2 and new source code refactoring startedApr 05, 2006: Heavy development activity in trunk (development branch) …
Oct 25, 2006: GRASS GIS 6.2.0 released in October 2006
Apr 10, 2007: Preparing the GRASS GIS 6.2.2 release…
Jun 16, 2007: GRASS GIS 6.2.2 released in June 2007
Nov 01, 2007: Raster and vector modules being actively maintained…
Apr 02, 2007: New graphical user interface development speeding up (wxGUI)
Feb 20, 2008: Copyright statements prettified in many files
May 31, 2008: New GRASS 6 development branch being split off from trunk (which becomes GRASS 7)
Jun 10, 2008: Developers moving over to new branch
Feb 23, 2009: GRASS 6.4 release branch split off from GRASS 6 development branch
https://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.png00Markushttps://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.pngMarkus2013-12-18 08:01:182024-01-22 20:39:27Video: GRASS GIS development visualization from 1999 to 2013
GRASS GIS, commonly referred to as GRASS (Geographic Resources Analysis Support System), is the free Geographic Information System (GIS) software with the longest record of development as FOSS4G community project. The increasing demand for a robust and modern analytical free GIS led to the start of GRASS GIS 7 development in April 2008. Since GRASS 6 more than 10,000 changes have been implemented with a series of new modules for vector network analysis, image processing, voxel analysis, time series management and improved graphical user interface. The core system offers a new Python API and large file support for massive data analysis. Many modules have been undergone major optimization also in terms of speed. The presentation will highlight the advantages for users to migrate to the upcoming GRASS GIS 7 release.
The GRASS GIS community is delighted to present the outcome of the 4th Community Sprint that took place in a warm and sunny Prague, Czech Republic, from July 12 to July 18, 2013. The event happened after the Geoinformatics conference at the Czech Technical University in Prague. The Community Sprint was once more a creative gathering of both long-term and new developers, as well as users.
This meeting was held in the light of 30 YEARS OF GRASS GIS!
We wish to cordially thank the Department of Mapping and Cartography, Faculty of Civil Engineering, Czech Technical University in Prague for hosting and technical support. In particular, we gratefully acknowledge our association sponsors OSGeo and FOSSGIS e.V., and many individual donors: Peter Löwe, Andrea Borruso, Massimo Di Stefano, Alessandro Sarretta, Joshua Campbell, Andreas Neumann, Jon Eiriksson, Luca Casagrande, Karyn O Newcomb, Holger Naumann, Anne Ghisla, Helena Mitasova and Lubos Mitas, Dimitris Tamp, Mark Seibel, Markus Metz, and Tawny Gapinski. These financial contributions were used to cover costs such as meals and to help reducing travelling and accommodation expenses for participants with far arrival who came on own expenses.
Developers and users who joined the event came from various countries like Italy, Czech Republic, Slovak Republic, Poland, Sri Lanka/France, USA and Germany.
The Community Sprint focused on:
About GRASS GIS
The Geographic Resources Analysis Support System, commonly referred to as GRASS GIS, is an Open Source Geographic Information System providing powerful raster, vector and geospatial processing capabilities in a single integrated software suite. GRASS GIS includes tools for spatial modeling, visualization of raster and vector data, management and analysis of geospatial data, and the processing of satellite and aerial imagery. It also provides the capability to produce sophisticated presentation graphics and hardcopy maps. GRASS GIS has been translated into about twenty languages and supports a huge array of data formats. It is distributed freely under the terms of the GNU General Public License (GPL). GRASS GIS is an official project of the Open Source Geospatial Foundation (OSGeo).
GRASS GIS 6.4.3 released – Birthday release for 30 years of GRASS GIS https://grass.osgeo.org
We are pleased to announce the release of a new stable version of GRASS GIS. This release fixes bugs discovered in 6.4.2 version of the program and adds a number of new features. This release includes over
830 updates to the source code since 6.4.2. As a stable release series, the 6.4 line will enjoy long-term support and incremental enhancements while preserving backwards-compatibility with the entire GRASS 6 line.
Key improvements of this release include some new functionality (assistance for topologically unclean vector data), major speedup for some vector modules, fixes in the vector network modules, fixes for the wxPython based portable graphical interface (attribute table management, wxNVIZ, and Cartographic Composer). A number of new modules have been added for processing LANDSAT and MODIS satellite data, and a new vector statistics module is also introduced. Many new symbols and north arrows are available, and the user will find an improved and easier to use wizard for creating custom project locations with precise map projection and datum support. Community-contributed add-on modules are now more easily and robustly installed from an online archive. Other major developments include enhancements to the Python scripting library and numerous software-compatibility fixes and translation updates. Important is the enhanced portability for MS-Windows (native support, fixes in case of missing system DLLs). And we welcome Romanian as our twenty-fourth language!
Video of GRASS GIS 6.4 development visualization from 1999 to 2013 (with soundtrack)
About GRASS GIS
GRASS (Geographic Resources Analysis Support System) is a free and open source Geographic Information System (GIS) software suite used for geospatial data management and analysis, image processing, graphics and map production, spatial modeling, and 3D visualization. GRASS GIS is currently used in academic and commercial settings around the world, as well as by many governmental agencies and environmental consulting companies. GRASS GIS can be used either as a stand-alone application or as backend for other software packages such as QGIS and R geostatistics. It is a founding member of the Open Source Geospatial Foundation (OSGeo).