The GRASS GIS Annual Report for 2023 highlights a year of significant achievements and developments in the GRASS GIS project, which celebrated its 40th anniversary.

Here’s a summary of the report:
- Community Meeting: The GRASS GIS Community Meeting was held in June at the Czech Technical University in Prague, bringing together a diverse group of participants from various countries. Additionally, community members participated in the OSGeo Community Sprint in Vienna in November.
- Development Activity: The year saw the release of the GRASS GIS 8.3.0 feature release and three maintenance releases. There were 418 pull requests created, 387 merged, and 103 issues resolved. Nine new addons were added by several contributors. The top five contributors were acknowledged, and a new core contributor was welcomed. Also a GRASS Student Grant was awarded.
- Conferences in 2023: GRASS GIS was represented at several conferences, including the North Carolina GIS conference, FOSS4G in Kosovo and North America, and the OpenGeoHub Summer School. Topics covered ranged from parallelization in GRASS GIS to computational notebooks for geospatial computation.
- GRASS GIS in Industry: OpenPlains Inc., a startup utilizing GRASS GIS, was founded. Additionally, a subaward was granted to research software engineers at North Carolina State University to enhance GRASS GIS, funded by an NSF grant awarded to Natrx.
- GRASS GIS in Academia: A significant NSF grant was awarded to a team from four U.S. universities to support the GRASS GIS community. Various academic activities, including workshops, courses, and lectures, were conducted throughout the year, emphasizing the application of GRASS GIS in different fields.
- GRASS GIS in Government: The U.S. Geological Survey released a training video on using GRASS GIS with 3D Elevation Program data. The NC State University team received research support from the US Department of Agriculture for developing GRASS modules for surface water modeling.
Congratulations to all contributors!
The full report is available at https://grass.osgeo.org/news/2023_12_19_annual_report/
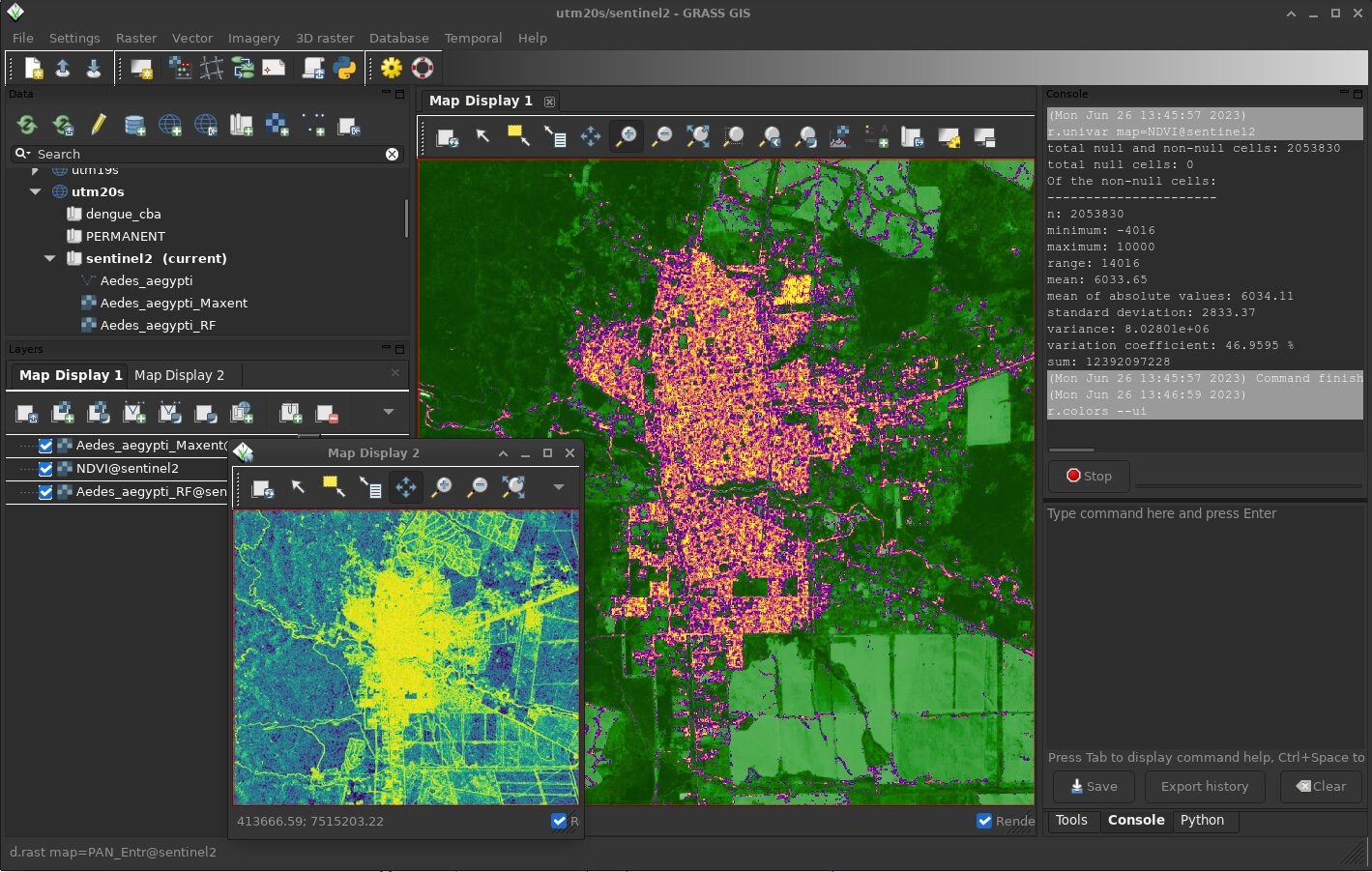
Open source software projects thrive on the contributions of the community, not only for the code, but also for making the software accessible to a global audience. One of the critical aspects of this accessibility is the localization or translation of the software’s messages and interfaces. In this context, Weblate (https://weblate.org/) has proven to be a powerful tool for managing these translations, especially for projects such as GRASS GIS, which is part of OSGeo (Open Source Geospatial Foundation).
![]()
![]()
What is Weblate?
Weblate is an open source translation management system designed to simplify the translation process of software projects. It provides an intuitive web interface that allows translators to work without deep technical knowledge. This ease of use combined with robust integration capabilities makes Weblate a popular choice for open source projects.
GRASS GIS and Localization
GRASS GIS (https://grass.osgeo.org/), a software suite for managing and analyzing geospatial data, is used worldwide and therefore needs to be available in many languages. The project uses Weblate, hosted by OSGeo, to manage and facilitate its translation work (see OSGeo-Weblate portal).
Marking messages for translation
Before translation work can begin, the messages to be translated must be marked for translation in the GRASS GIS source code. This is done with the gettext macro _(“…”). GNU gettext is a GNU library for the internationalization of software. Here is a simplified overview of the process:
- Identify the strings to be translated: The developers identify the strings in the source code that need to be translated. These are usually user messages, while debug messages are not marked for translation.
- Use the gettext macro: The identified strings are packed into a gettext macro. For example, a string “Welcome to GRASS GIS” in the source code would be changed to _(“Welcome to GRASS GIS”). This change indicates that the string should be used for translation.
- Extraction and template generation: Tools such as xgettext are used to extract these marked strings from the source code and create a POT (Portable Object Template) file. This file is used as a template for all translations. In the GRASS GIS project the template language is English.
There are three template files in the GRASS GIS project: one with the graphical user interface (GUI) messages, one with the library functions (libs) and one with the modules (mods).
Connecting the software project to Weblate
While the POT files could be transferred to Weblate manually, we chose the automated option. The OSGeo Weblate instance is directly connected to the GRASS GIS project via git (GitHub) using the Weblate version control integration.
How it works in practice:
- Developer makes a commit to the GRASS GIS repo on GitHub
- A GitHub webhook makes a call to weblate.osgeo.org – note that it has it’s own local git repo for GRASS GIS, as it does for other OSGeo projects, with translations being managed in this Weblate instance. This local git repo is updated when the webhook is fired.
- As messages are translated in OSGeo-Weblate, they are eventually pushed to the Weblate Github fork of GRASS GIS (the push frequency is set to 24 hours by default, i.e., new translations are collected over a day), and Weblate then triggers a pull request to the main GRASS GIS repo on GitHub.
For technical background on the OSGeo Weblate installation, see the related OSGeo-SAC Weblate page.
Translation process in Weblate
Here is how the typical translation process looks like:
- Translator registration: Registration (via OSGeo-ID) and login to the Weblate instance.
- Language selection: Select the language to be translated. If a language does not exist yet, it can be added with the approval of the project managers.
- Translation interface: Weblate provides an easy-to-use web interface where translators can view the original texts and enter their translations. If activated, machine translation can also be used here (DeepL, Google Translate, etc.). The Weblate translation memory helps to quickly translate identical and similar sentences.
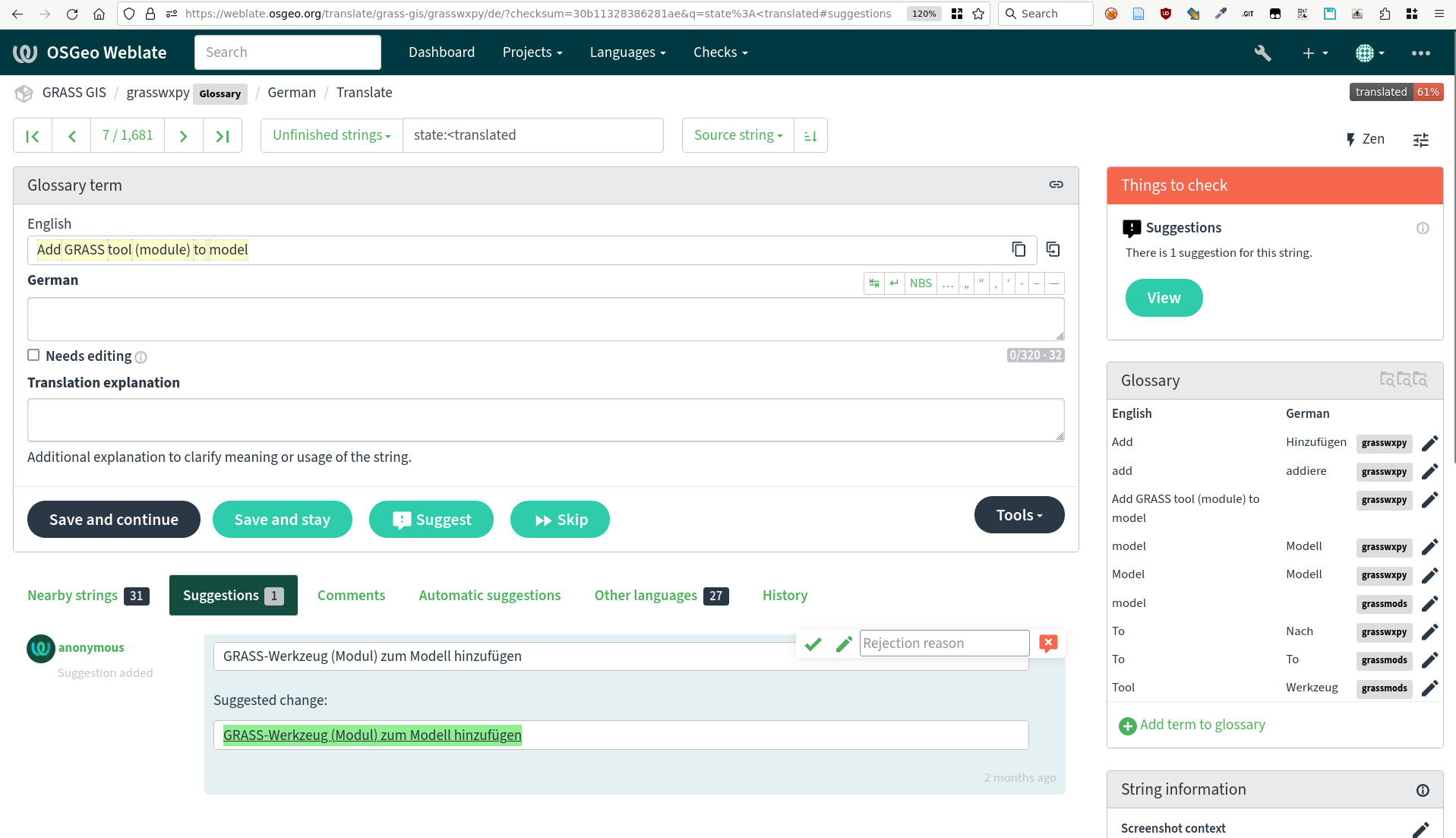
GRASS GIS messages in Weblate
- Together we are better: translators can discuss translations, resolve conflicts and suggest improvements. Weblate also offers quality checks to ensure consistency and accuracy. Translations in different languages can be compared in tabular form.
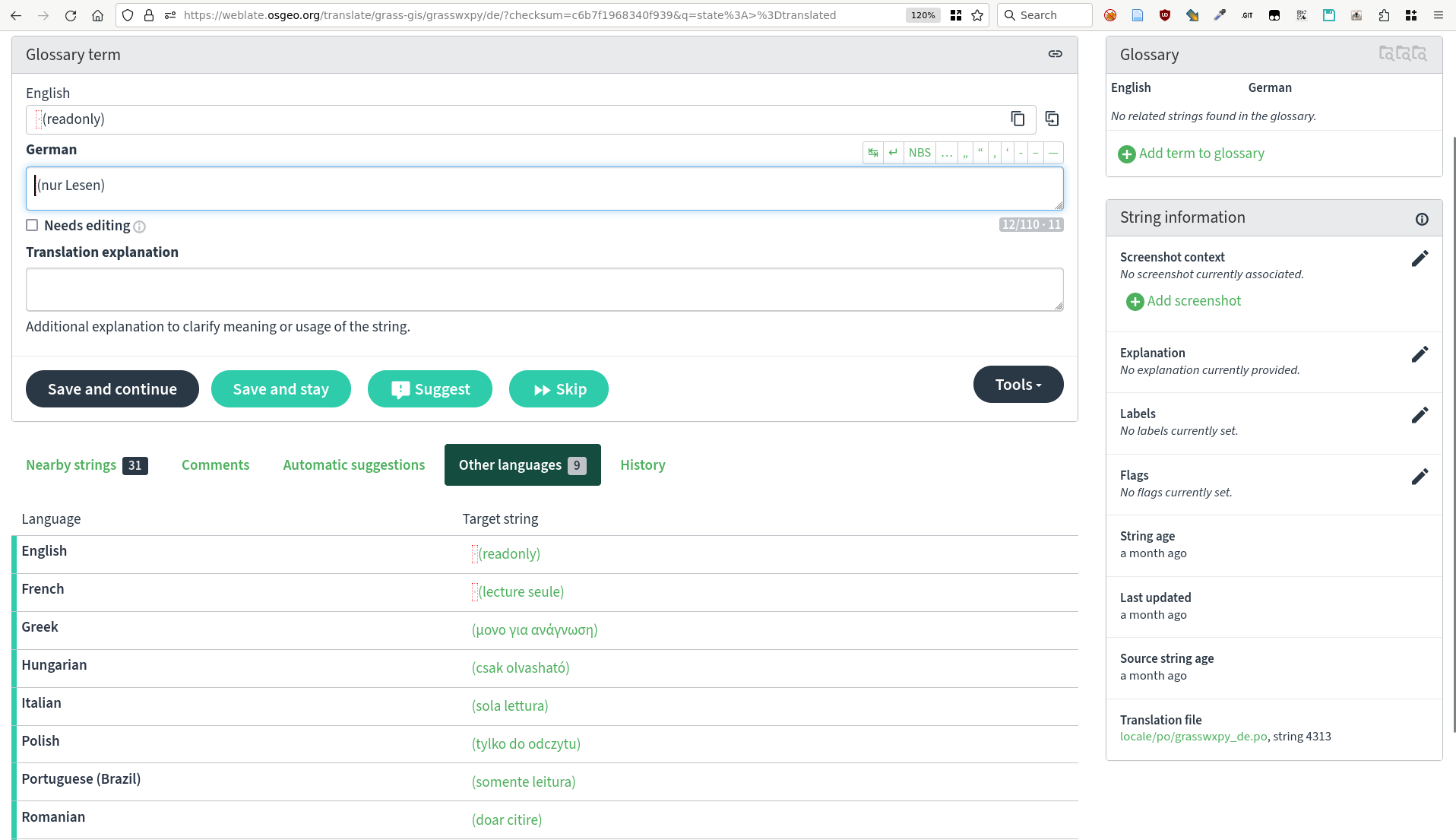
Message translation comparison in Weblate (GRASS GIS project example)
- Integration with source code: Once translations are completed and checked, they are written back into the GRASS GIS source code (see above). Weblate supports automatic synchronization with source code repositories.
- Continuous updates: As the source code evolves, new strings can be marked for translation and Weblate is automatically updated to reflect these changes.
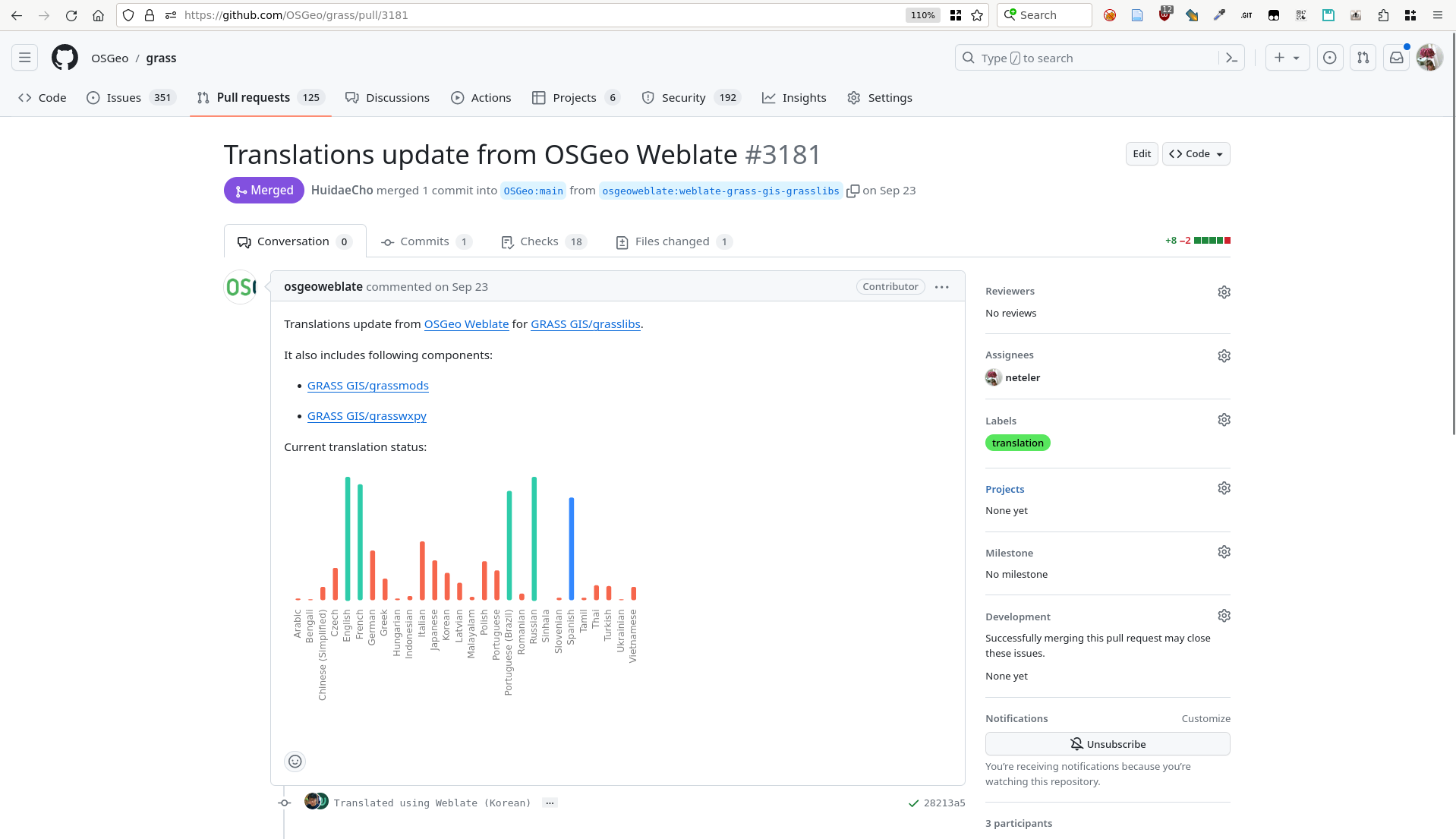
Pull request with new translations opened by Weblate in GRASS GIS Github repository
Benefits for the GRASS GIS project
By using Weblate, GRASS GIS benefits from the following advantages:
- Streamlined translation workflow: The process from tagging strings to integrating translations is efficient and manageable.
- Community engagement: Weblate’s ease of use encourages more community members to participate in the translation process.
- Quality and Consistency: Weblate ensures high quality translations through integrated quality checks and collaboration tools.
- Up-to-date localization: Continuous synchronization with the source code repository ensures that translations are always up-to-date.
Conclusion
The integration of Weblate into the GRASS GIS development workflow underlines the importance of localization in open source software. By using tools such as gettext for message tagging and Weblate for translation management, GRASS GIS ensures that it remains accessible and usable for a global community, embodying the true spirit of open source software.
Thanks
Thanks to Regina Obe from OSGeo-SAC for her support in setting up and maintaining the OSGeo-Weblate instance and for her explanations of how things work in terms of Weblate/GitHub server communication.
What’s new in a nutshell
The GRASS GIS 8.3.1 maintenance release provides more than 60 changes compared to 8.3.0. This new patch release brings in important fixes and improvements in GRASS GIS modules and the graphical user interface (GUI) which stabilizes the new single window layout active by default.
Some of the most relevant changes include: fixes for r.watershed which got partially broken in the 8.3.0 release; and a fix for installing addons on MS Windows with g.extension.
Translations continue in Weblate, which automatically creates pull requests with the translated chunks. We’d like to thank the translators of all languages for their ongoing support!

Full list of changes and contributors
For all 60+ changes, see our detailed announcement with the full list of features and bugs fixed at GitHub / Releases / 8.3.1.
Thanks to all contributors!
Software downloads
Binaries/Installers download
- Windows
- macOS
- Linux
Further binary packages for other platforms and distributions will follow shortly, please check at software downloads.
Source code download
- https://grass.osgeo.org/grass83/source/
- https://grass.osgeo.org/grass83/source/grass-8.3.1.tar.gz
- From GitHub
First time users may explore the first steps tutorial after installation.
About GRASS GIS
The Geographic Resources Analysis Support System (https://grass.osgeo.org/), commonly referred to as GRASS GIS, is an Open Source Geographic Information System providing powerful raster, vector and geospatial processing capabilities. It can be used either as a stand-alone application, as backend for other software packages such as QGIS and R, or in the cloud. It is distributed freely under the terms of the GNU General Public License (GPL). GRASS GIS is a founding member of the Open Source Geospatial Foundation (OSGeo).
The GRASS Dev Team
The OpenGeoHub Foundation is pleased to award Markus Neteler with the ‘Life Achievement Award 2022’
 The 8.2.0 release of GRASS GIS is now available with results from the GSoC 2021 and many other additions. A new grass.jupyter package is now included for interacting with Jupyter notebooks. Single window graphical user interface is available in GUI settings. r.series and three other modules are newly parallelized. Additionally, the release includes a series of scripting, packaging, and reproducibility improvements.
The 8.2.0 release of GRASS GIS is now available with results from the GSoC 2021 and many other additions. A new grass.jupyter package is now included for interacting with Jupyter notebooks. Single window graphical user interface is available in GUI settings. r.series and three other modules are newly parallelized. Additionally, the release includes a series of scripting, packaging, and reproducibility improvements.
For all 220+ changes, see our detailed announcement with the full contributors and list of features and bugs fixed at GitHub / Releases / 8.2.0. Special thanks to GSoC students, their mentors, and first-time contributors!
Packages and installers are now available for Windows, macOS, Debian, Fedora, and Gentoo with more coming soon.
See more at grass.osgeo.org / News.
This is an update release of the GRASS GIS 8.0 series.
Download source code tarball at
- https://grass.osgeo.org/
grass80/source/grass-8.0.1. tar.gz - https://grass.osgeo.org/
grass80/source/grass-8.0.1. md5sum
For further release details (bug fixes and enhancements), see
The GRASS GIS 8.0.1 release provides more than 20 fixes and improvements with respect to the release 8.0.0.
What’s Changed
Important fixes
- utils/mkhtml: fix print warning/fatal message during compilation to not break offline compilations (#2139) by @tmszi
- r.quantile, r.stats.quantile, lib/stats: fix quantile algorithm (#2108) by @metzm
Module fixes
- r.colors: fix order of rules (#2167) by @metzm
- r.geomorphon: combine profile parser rules to allow usage as pygrass module (#2154) (#2226) by@ninsbl
- TGIS: fix semantic label (#2215) by @metzm
- t.rast.mapcalc: transfer semantic label (#2219) by @metzm
- t.rast.neighbors: transfer semantic label (#2218) by @metzm
GUI
- wxGUI: do not import from pygrass on gui startup (#2202) by @petrasovaa
- wxGUI: Thread.setDaemon deprecated in Python 3.10 (#2145) by @petrasovaa
Portability
Documentation
- CONTRIBUTING.md: describe the fork process more in detail by @pesekon2
- Fix typo in v.import documentation (#2142) by @agiudiceandrea
- howto_release.md: cleanup of marketing section by @neteler
- manual pages: remove unneeded SVN Date entry and selected cleanup (#2143) by @neteler
Singularity
Full Changelog: 8.0.0...8.0.1
Visit also the release page
Thanks to all contributors!
Overview of changes
After more than 3 year of development the first stable release GRASS GIS 8.0.0 is available. Efforts have concentrated on making the user experience even better, providing many new useful additional functionalities to modules and further improving the graphical user interface.
Breaking news: new graphical user interface with entirely rewritten startup sequence!
This re-establishes user experience compatibility with QGIS and other connected software packages.
The GRASS GIS 8.0.0 release provides more than 1,400 fixes and improvements with respect to the release 7.8.6.
With the introduction of the semantic label raster metadata class, the temporal database was modified to version 3. Hence, to be able to read and process GRASS 7.x space-time datasets, users will be prompted to run t.upgrade. If users want to read newly created space-time datasets back in GRASS 7.x, they can run t.downgrade.
Launching the software
The user experience of the graphical user interface has been completely rewritten: no more clumsy selection screens – just enter the menu system directly! And on command line, GRASS GIS now starts versionless, i.e. as grass. Enjoy!
Download and detailed list of changes
Thanks to all contributors!
Overview of changes
After more than 3 year of development the first stable release GRASS GIS 8.0.0 is available. Efforts have concentrated on making the user experience even better, providing many new useful additional functionalities to modules and further improving the graphical user interface.
Breaking news: new graphical user interface with entirely rewritten startup sequence!
This re-establishes user experience compatibility with QGIS and other connected software packages.
The GRASS GIS 8.0.0 release provides more than 1,300 fixes and improvements with respect to the release 7.8.6.
With the introduction of the semantic label raster metadata class, the temporal database was modified to version 3. Hence, to be able to read and process GRASS 7.x space-time datasets, users will be prompted to run t.upgrade. If users want to read newly created space-time datasets back in GRASS 7.x, they can run t.downgrade.
Launching the software
The user experience of the graphical user interface has been completely rewritten: no more clumsy selection screens – just enter the menu system directly!
And on command line, GRASS GIS now starts versionless, i.e. as grass.
Download and detailed list of changes
See https://github.com/OSGeo/grass/releases/tag/8.0.0RC2
Thanks to all contributors!
![]() GRASS GIS is an open source geoinformation system which is developed by a globally distributed team of developers. Besides the source code developers also message translators, people who write documentation, those who report bugs and wishes and more are involved.
GRASS GIS is an open source geoinformation system which is developed by a globally distributed team of developers. Besides the source code developers also message translators, people who write documentation, those who report bugs and wishes and more are involved.
Early days… from pre-Internet to CVS and SVN
While GRASS GIS is under development since 1982 (no typo!) it has been put into a centralized source code management system in December 1999. Why so late? Because the World Wide Web (WWW) became available in the 1990s along with tools like browsers and such, followed by the development of distributed source code management tools. We moved on 29th Dec 1999 (think Y2K bug) the entire code into our instance of CVS (Concurrent Versioning System). With OSGeo being founded in 2006, we migrated the CVS repository to SVN (Subversion for the source code management) and trac (bug and wish tracker) on 8 Dec 2007. See here for historic details on our various bug trackers.
Time to move on: git
Now, after more than 10 years using SVN/trac time had come to move on and join the large group of projects managing their source code in git (see also our related Wiki page on migration). Git comes with numerous advantages, yet we needed to decide which hosting platform to use. Options where github.com, gitlab.com, gitlab or gitea on OSGeo infrastructure, or other platforms. Through a survey we found out that the preference among contributors is GitHub. While not being open source itself it offers several advantages: it is widely known (good to get new developers interested and involved), numerous OSGeo projects are hosted there under the GitHub “OSGeo organization“.
If all fails (say, one day GitHub no longer being a reasonable choice) the import of our project from GitHub to GitLab is always possible. Indeed, we meanwhile mirror our code on OSGeo’s gitea server.
Relevant script code and migration ticket:
- svn -> git test migration ongoing, see #3722
- svn2git code written by Martin Landa
- Martin Landa also forked an existing “trac2github” PHP convertion script which includes GRASS related changes; it is available at https://github.com/landam/trac2github/tree/grass
Relevant steps:
- migrated SVN trunk -> git master
- migrated and tagged release branches (milestones)
- deleted “develbranch6” (we compared it to “releasebranch_6_4” and didn’t discover relevant differences)
- Fix commit messages (yes, we really wanted to be brave, updating decades of commit messages!):
- references to old RT tracker tickets (used Dec 2000 – Dec 2006)
- references to old GForge tracker tickets (used Jan 2007 – Dec 2008)
- references to other trac tickets (#x -> https://trac.osgeo.org/…)
Source code migration: the new git repositories
- github repository “grass” (repo)
- Source code from 1999 to present day (SVN-trunk -> git-master)
- all 7.x release branches
- github repository “grass-legacy” (repo)
- separate repository for older GRASS GIS releases (3.2, 4.x, 5.x, 6.x), hence source code now available in git since 1987!
- github repository “grass-addons” (repo)
- repository for addons
- github repository “grass-promo” (repo)
- repository for promotional material
- github repository “grass-website” (repo)
- repository for upcoming new Website
Remarks on the “grass-legacy” repository
What special about it:
- the source code goes back to 1987!
- file timestamps (which I tried to preserve for decades :-) have been used to reconstruct the source code history (e.g., releasebranch_3_2)
- junk files removed (plenty of leftover old binary files, files consisting of a special char only etc)
- having this grass-legacy repo available in parallel to the main grass repo which contains the recent source code we have a continuous source code coverage from 1987 to today in git.
- size is about 250MB
What’s missing
- the 4.3 source code doesn’t have distinct timestamps. Someone must have once packaged without mtime preservation… a pity. Perhaps a volunteer may fix that by carrying over the timestamps from GRASS GIS 4.2 in case the md5sum of a file is identical (or so).
Trac issue migration
A series of links had to be updated. Martin Landa invested days and days on that (thanks!!). He used the related GDAL efforts as a basis (Even Rouault: thanks!). As the date for the trac migration we selected 2007-12-09 (r25479) as it was the first SVN commit (after the years in CVS). The migration of trac bugs to github (i.e. transfer of trac ticket content) required several steps:
Link updates in the ticket texts:
- links to other tickets (now to be pointed to full trac URL). Note that there were many styles of referring in the commit log message which had to be parsed accordingly
- links to trac wiki (now to be pointed to full trac URL)
- links source code in SVN (now to be pointed to full trac URL)
- images and attachments (now to be pointed to full trac URL)
Transferring:
- “operating system” trac label into the github issue text itself (following the new issue reporting template)
- converting milestones/tickets/comments/labels
- converting trac usernames to Github usernames
- setting assignees if possible, set new “grass-svn2git” an assignee otherwise
- slowing down transfer to match the 60 requests per second API limit rate at github
Fun with user name mapping
Given GRASS GIS’ history of 35+ years we had to invest major effort in identifying and mapping user names throughout the decades (see also bug tracker history). The following circumstances could be identified:
- user present in CVS but not in SVN
- user present in SVN but not in CVS
- user present in both with identical name
- user present in both with different name (well, in our initial CVS days in 1999 we often naivly picked our surnames like “martin”, “helena”, “markus”, “michael” … cute yet no scaling very much over the years!) as some were changed in the CVS to SVN migration in 2007, leading to
- colliding user names
- some users already having a github account (with mostly different name again)
We came up with several lookup tables, aiming at catching all variants. Just a “few” hours to dig in old source code files and in emails for finding all the missing email addresses…
Labels for issues
We cleaned up the trac component of the bug reports, coming up with the following categories which have to be visually grouped by color since the label list is just sorted alphabetically in github/gitlab:
- Issue category:
- bug
- enhancement
- Issue solution (other than fixing and closing it normally):
- duplicate
- invalid
- wontfix
- worksforme
- Priority:
- blocker
- critical
- feedback needed
- Components:
- docs
- GUI
- libs
- modules
- packaging
- python
- translations
- unittests
- Windows specific
Note that the complete issue migration is still to be done (as of Nov. 2019). Hopefully addressed at the GRASS GIS Community Sprint Prague 2019.
Setting up the github repository
In order to avoid users being flooded by emails due to the parsing of user contributions which normally triggers an email from github) we reached out to GitHub support in order to temporarily disable these notifications until all source code and selected issues were migrated.
The issue conversion rate was 4 min per trac bug to be converted and uploaded to github. Fairly slow but likely due to the API rate limit imposed and the fact that the migration script above generates a lot of API requests rather than combined ones..
Note to future projects to be migrated: use the new gihub import API (unfortunately we got to know about its existence too late in our migration process).
Here out timings which occurred during the GRASS GIS project migration from SVN to github:
- grass repo: XX hours (all GRASS GIS 7.x code)
- grass-legacy repo: XX hours (all GRASS GIS 3.x-6.x code)
- NNN issues: XX hours – forthcoming.
New issue reporting template
In order to guide the user when reporting new issues, we will develop a small template – forthcoming.
Email notifications: issues to grass-dev and commits to grass-commit
We changed the settings from SVN post-hook to Github commit notifications and they flow in smoothly into the grass-commit mailing list. Join it to follow the development.
Overall, after now several months of using our new workflow we can state that things work fine.