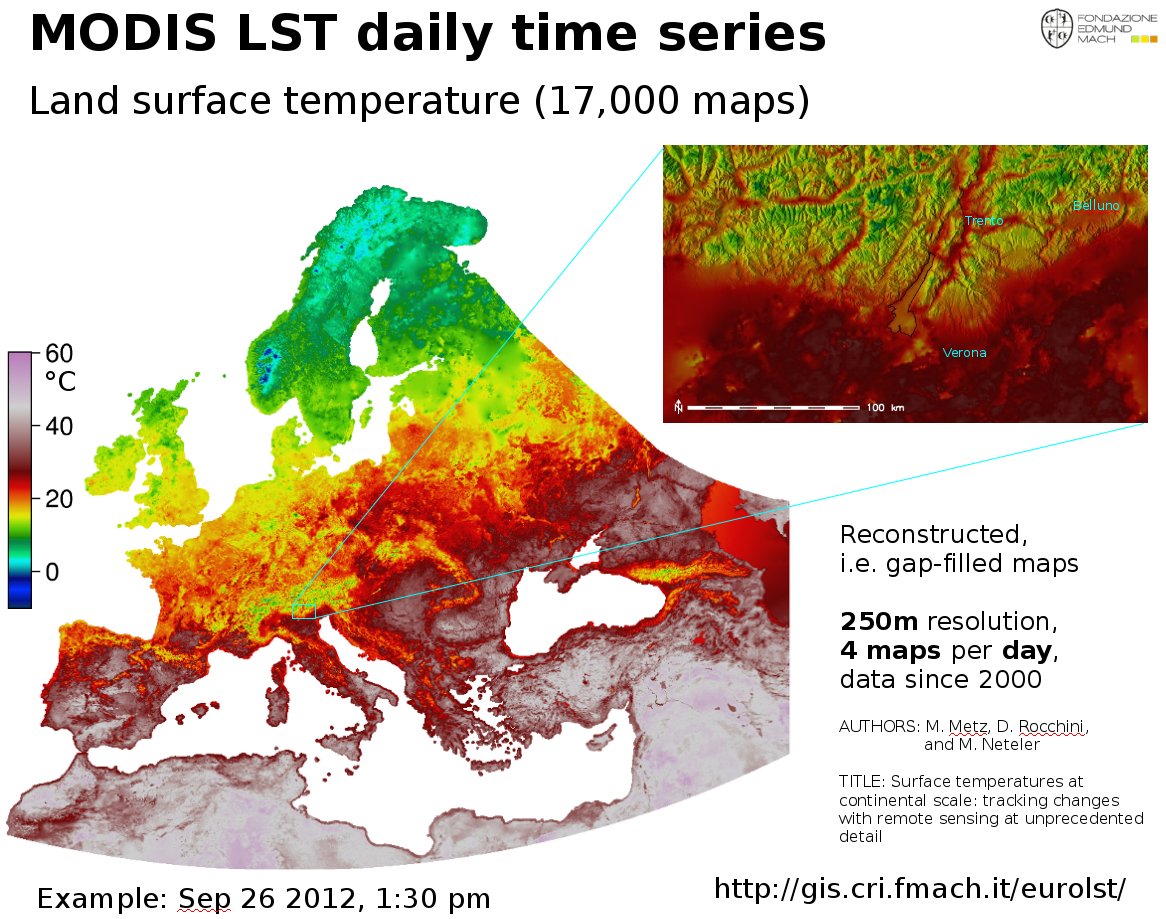
The EuroLST dataset is seamless and gap-free with a temporal resolution of four records per day and enhanced spatial resolution of 250 m. This newly developed reconstruction method (Metz et al, 2014) has been applied to Europe and neighbouring countries, resulting in complete daily coverage from 2001 onwards. To our knowledge, this new reconstructed LST time series exceeds the level of detail of comparable reconstructed LST datasets by several orders of magnitude. Studies on emerging diseases, parasite risk assessment and temperature anomalies can now be performed on the continental scale, maintaining high spatial and temporal detail. In their paper, the authors provide examples for implications and applications of the new LST dataset, such as disease risk assessment, epidemiology, environmental monitoring, and temperature anomalies.
Reconstructed MODIS Land Surface Temperature Dataset, at 250m pixel resolution (click figure to enlarge):
MODIS Land Surface Temperature (LST) reconstructed (gap-filled)
Article and data citation:
EuroLST has been produced by the former PGIS group at Fondazione Edmund Mach, DBEM based on daily MODIS LST (Product of NASA) maps.
Metz, M.; Rocchini, D.; Neteler, M. 2014: Surface temperatures at the continental scale: Tracking changes with remote sensing at unprecedented detail. Remote Sensing. 2014, 6(5): 3822-3840 (DOI | HTML | PDF)
Used software
Open Source commands used in processing (GRASS GIS 7):
links to the related manual pages involved in the data preparation
i.pca: Principal Components Analysis (PCA) for image processing.
r.regression.multi: it calculates multiple linear regression from raster maps
v.surf.bspline: it performs bicubic or bilinear spline interpolation with Tykhonov regularization.
Furthermore:
r.bioclim: calculates various bioclimatic indices from monthly temperature and optional precipitation time series (install in GRASS GIS 7 with “g.extention r.bioclim”)
pyModis: Free and Open Source Python based library to work with MODIS data
BIOCLIM derived from reconstructed MODIS LST at 250m pixel resolution
BIOCLIM-like European LST maps following the “Bioclim” definition (Hutchinson et al., 2009) – derived from 10 years of reconstructed MODIS LST (download to be completed) as GeoTIFF files, 250m pixel resolution, in EU LAEA projection:
Each ZIP file contains the respective GeoTIFF file (for cell value units, see below), the color table as separate ASCII file and a README.txt with details.
WMS/WCS Server
Using this URL, you can read the EuroLST BIOCLIM data directly via OGC WMS and WCS protocol:
The data published in this page are open data and released under the ODbL (Open Database License).
The full EuroLST dataset is not released online as open data (size: 18TB), please ask Luca Delucchi or Roberto Zorer for more info
Acknowledgments
The MOD11A1.005, MYD11A1.005 were retrieved from the online web site, courtesy of the NASA EOSDIS Land Processes Distributed Active Archive Center (LP DAAC), USGS/Earth Resources Observation and Science (EROS) Center, Sioux Falls, South Dakota, https://e4ftl01.cr.usgs.gov/
https://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.png00Markushttps://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.pngMarkus2015-09-13 18:01:252024-07-29 23:26:25The EuroLST seamless and gap-free daily European maps of land surface temperatures
LiDAR point cloud data are commonly delivered in the ASPRS LAS format. The format is supported by libLAS, a BSD-licensed C++ library for reading/writing these data. GRASS GIS 7 supports the LAS format directly when built against libLAS (as the case for most binary packages being available for download).
In this exercise we will import a sample LAS data set covering a tiny area close to Raleigh, NC (USA), belonging to the North Carolina sample data set. Sample LAS data download: https://grass.osgeo.org/sampledata/north_carolina/ (25MB).
For a full exercise, we will, however, assume that no GRASS GIS location is ready so far (so: newbies are welcome!) and create a new one initially.
1. Having the LAS file: now what?
In the first place, check the metadata of the LAS file using the lasinfo command (comes with libLAS; here only parts of the output shown):
lasinfo points.las
---------------------------------------------------------
Header Summary
---------------------------------------------------------
Version: 1.2
Source ID: 0
Reserved: 0
Project ID/GUID: '00000000-0000-0000-0000-000000000000'
System ID: 'libLAS'
Generating Software: 'libLAS 1.2'
[...]
Spatial Reference:
None
[...]
---------------------------------------------------------
Point Inspection Summary
---------------------------------------------------------
Header Point Count: 1287775
Actual Point Count: 1287775
Minimum and Maximum Attributes (min,max)
---------------------------------------------------------
Min X, Y, Z: 6066629.86, 2190053.45, -3.60
Max X, Y, Z: 6070237.92, 2193507.74, 906.00
Bounding Box: 6066629.86, 2190053.45, 6070237.92, 2193507.74
Time: 0.000000, 0.000000
Return Number: 1, 3
Return Count: 1, 7
Flightline Edge: 0, 0
Intensity: 0, 256
Scan Direction Flag: 0, 0
Scan Angle Rank: 0, 0
Classification: 2, 7
Point Source Id: 0, 0
User Data: 0, 0
Minimum Color (RGB): 0 0 0
Maximum Color (RGB): 0 0 0
Number of Points by Return
---------------------------------------------------------
(1) 1225886 (2) 61430 (3) 459
Number of Returns by Pulse
---------------------------------------------------------
(1) 30877 (2) 153 (5) 1225886 (6) 30706 (7) 153
Point Classifications
---------------------------------------------------------
647337 Ground (2)
639673 Low Vegetation (3)
740 Building (6)
25 Low Point (noise) (7)
-------------------------------------------------------
0 withheld
0 keypoint
0 synthetic
-------------------------------------------------------
We see: no spatial reference system indicated!
Luckily we know from here that the projection is NAD83(HARN) / North Carolina, LCC 2SP metric, EPSG code 3358). Furthermore we see:
Number of Points by Return: 3 (i.e., first, mid, last)
Point Classifications: the points are already classified as “Ground” (class 2), “Low Vegetation” (3), “Building” (6), and Low Point (noise) (class 7). Something to play with later.
Time to create a GRASS GIS location and import the LAS file.
2. Creating a GRASS GIS location for the LAS file
Since we know the EPSG code of the projection, that’s an easy task. Please note that GRASS GIS can generate locations directly from SHAPE files (with .prj file), GeoTIFF and more.
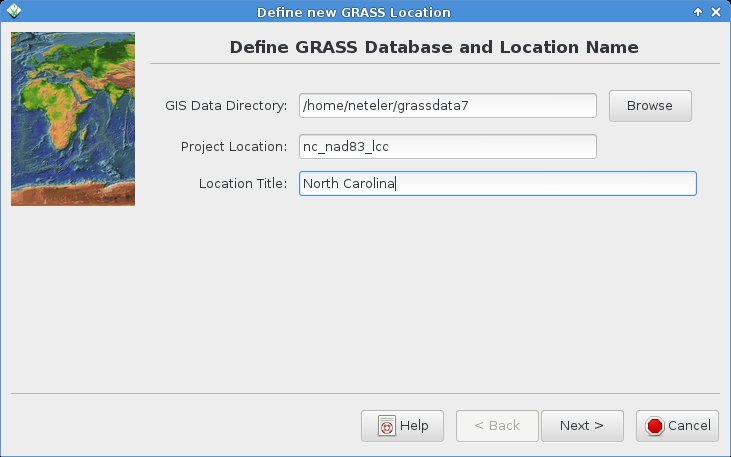
We fire up GRASS GIS 7 and open the Location Wizard:
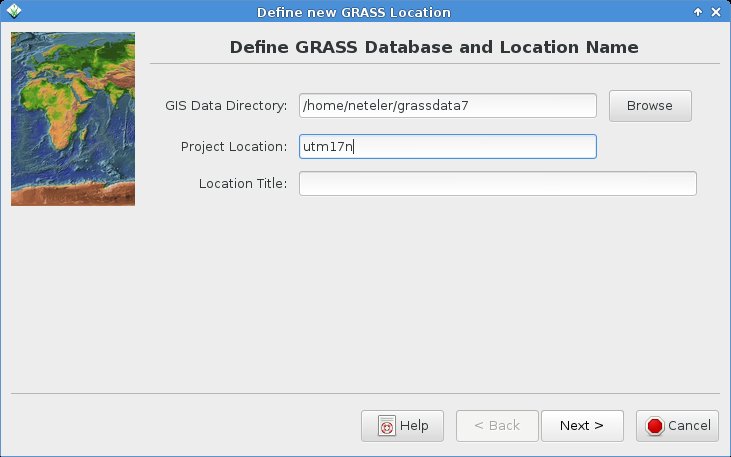
In the Location Wizard, we first define a name for the new location:
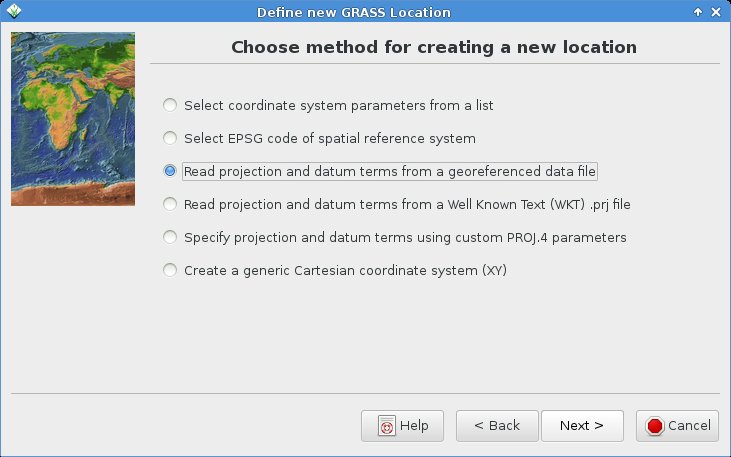
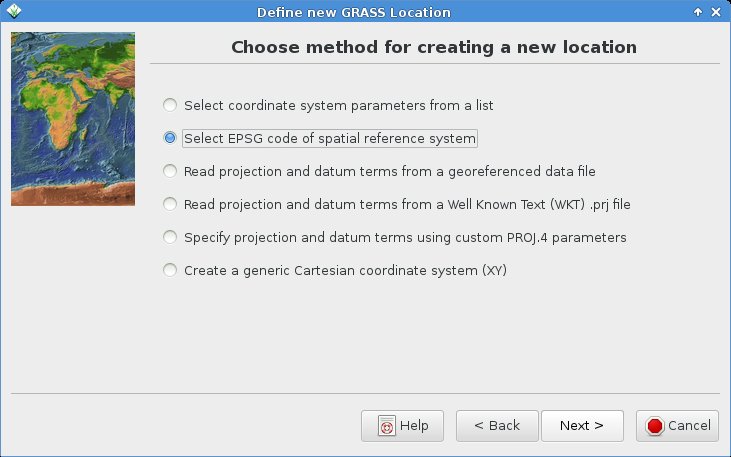
We select the “EPSG code” method for creating a new location:
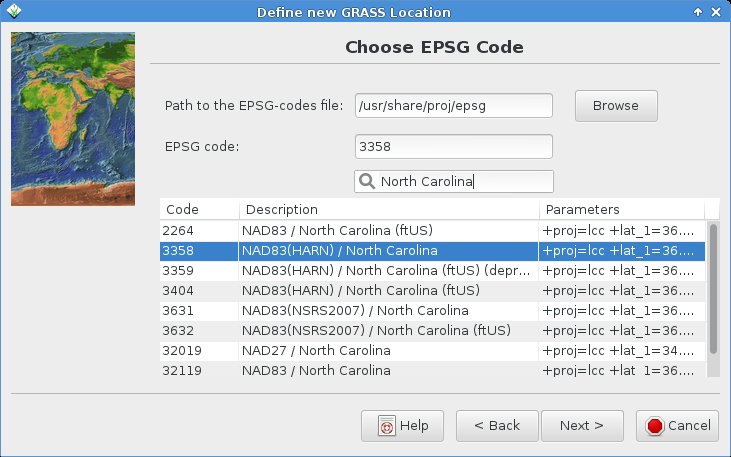
You can search for “North Carolina” and select the EPSG code 3358 from the list:
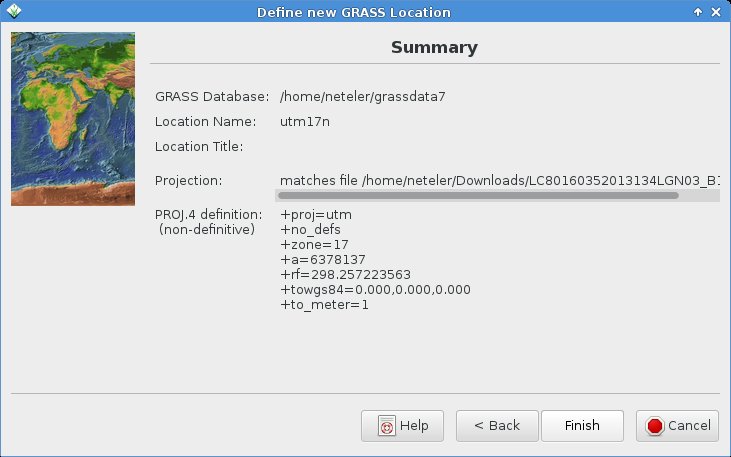
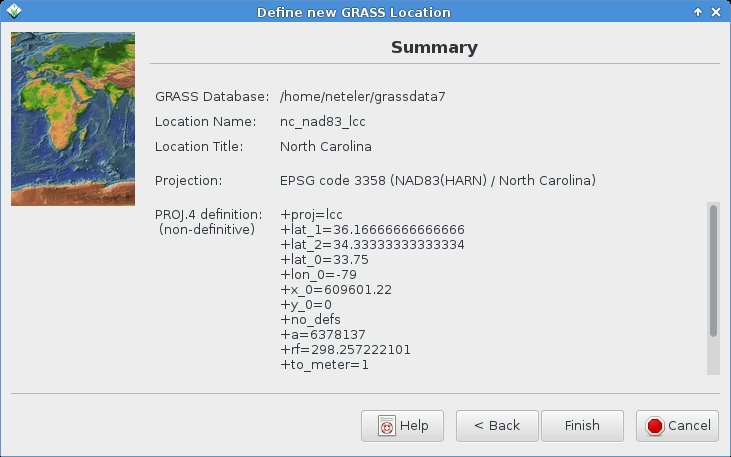
Next summary should show up as follows (be sure to have the metric projection shown!):
With “Finish” you reach this notification (indeed, nothing to change! It is already fine):
Since we want to import the LAS file, no need to manually define any region extent here – just say “No”:
While we could import the data also into the PERMANENT mapset, we prefer to create an own mapset “lasdata” for our LAS data (once you reach hundreds of maps to manage, you will be happy about the concept of mapsets):
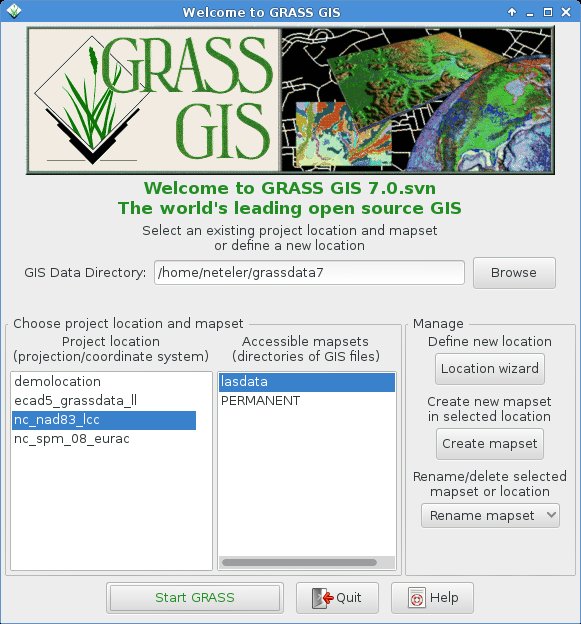
Voilà , we get back to the initial startup screen and can now start our GRASS GIS session with our “nc_nad83_lcc” location and “lasdata” mapset within the location: “Start GRASS”!
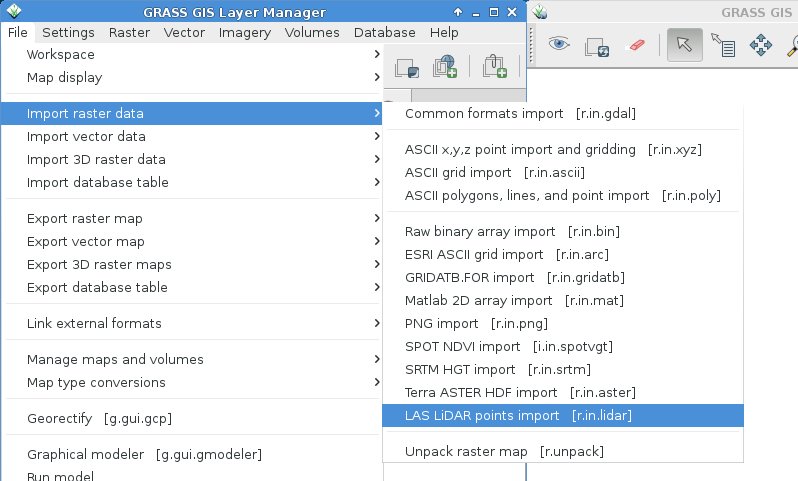
3. Import of the LAS file
When creating a new location from a GeoTIFF or SHAPE file (or other GDAL supported format), then the data set is imported right away. This is not the case for LAS files, also due to the fact that we can directly apply binning statistics during import of the LAS file (e.g. percentiles, min or max) and create a raster surface from the points right away rather than importing them as vector points.
3. a) Creating a raster surface from LAS during import
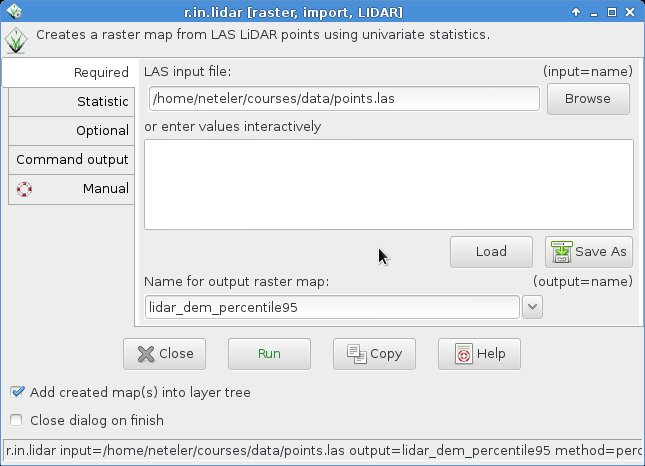
The LAS import into a raster surface is available through r.in.lidar:
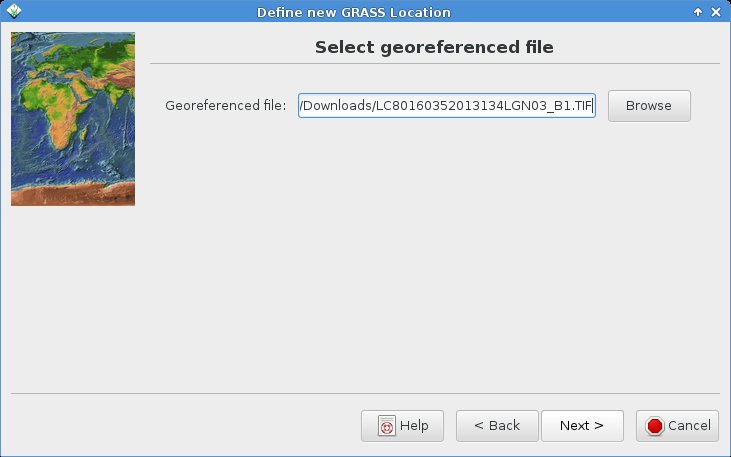
First the LAS file needs to be selected and an output file name specified (in this example, we want to extract the 95th percentile as binning method, hence a reasonable map name):
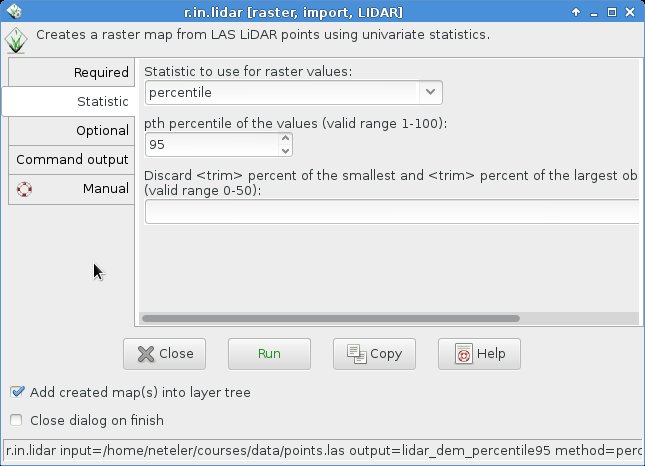
In the “Statistic” tab, we select the “percentile” method along with 95 as value:
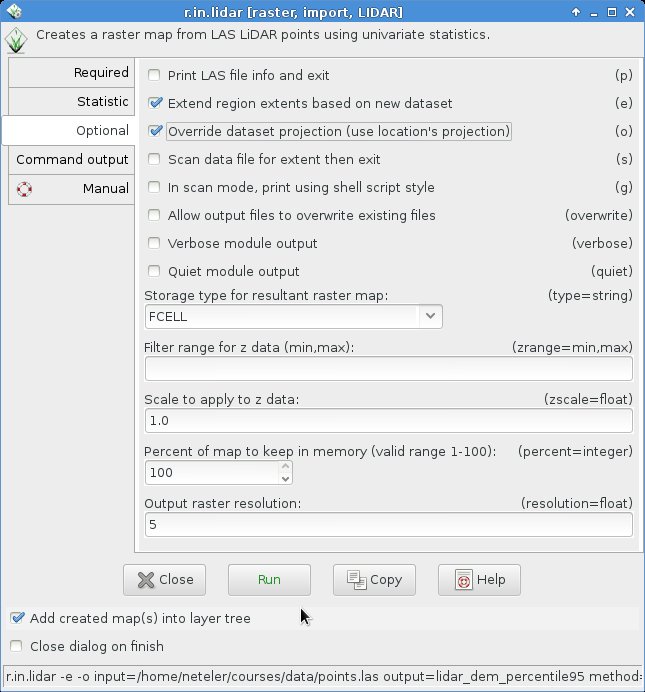
In the “Optional” tab we activate to extend the computational region from the LAS file and, since the spatial reference system metadata are lacking from the LAS file, also “override dataset projection” to use that predefined in the location. Finally, we define 5m as desired raster resolution for the resulting raster map:
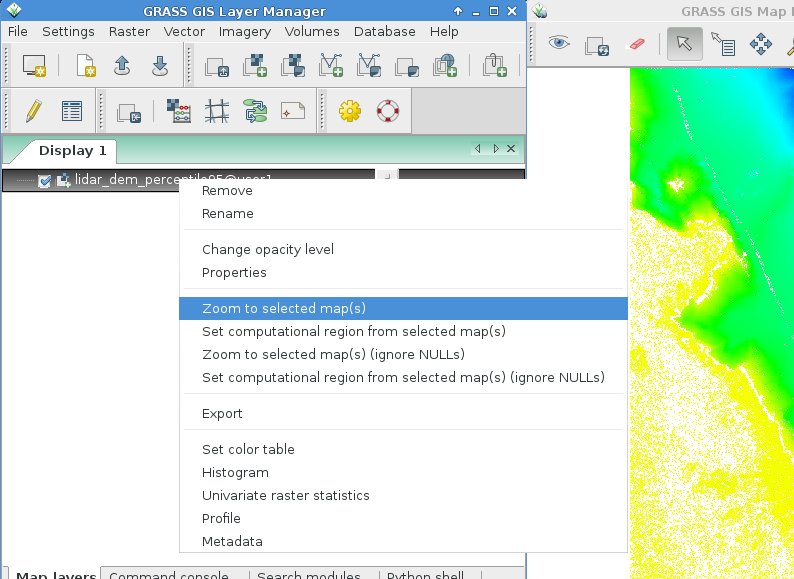
Upon conpletion of the import/binning, the new raster elevation map is shown after zooming to the map (r.in.lidar -e … restores upon completion the previous region settings, hence we may have to zoom):
Now we can start to analyze or visually explore the imported LAS file.
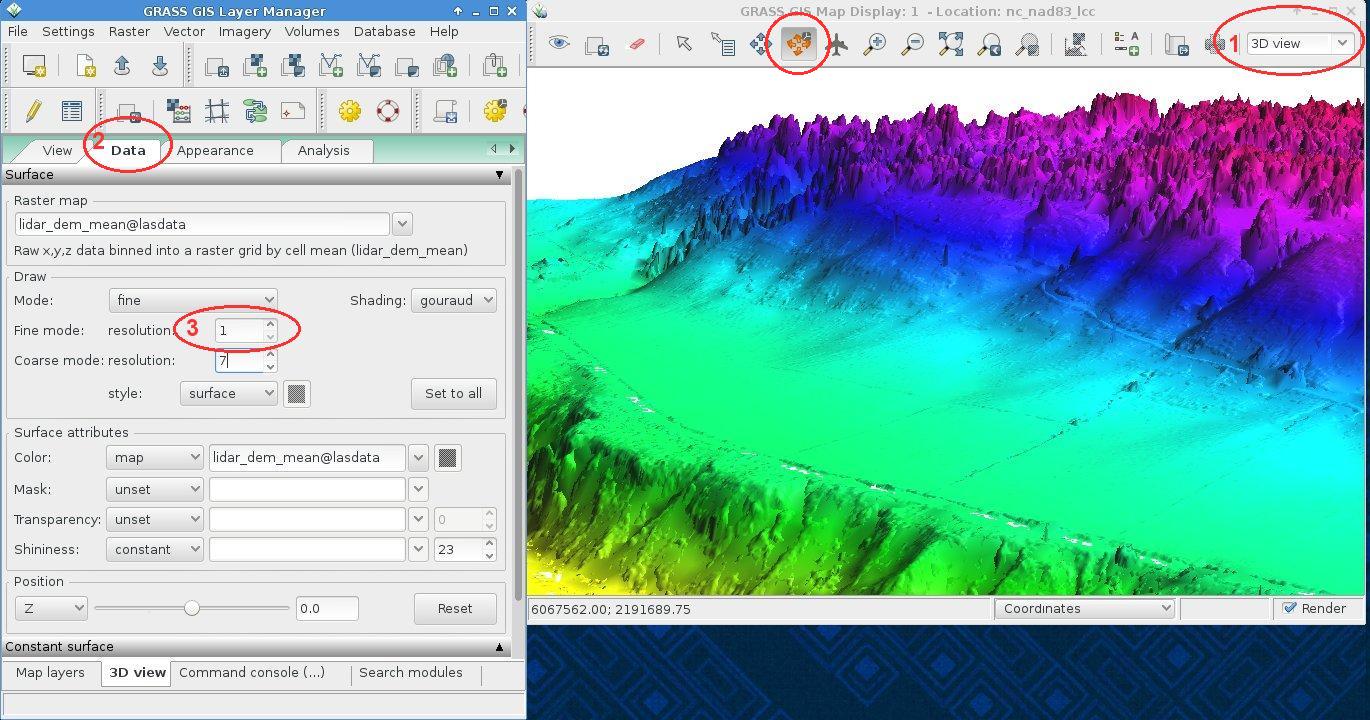
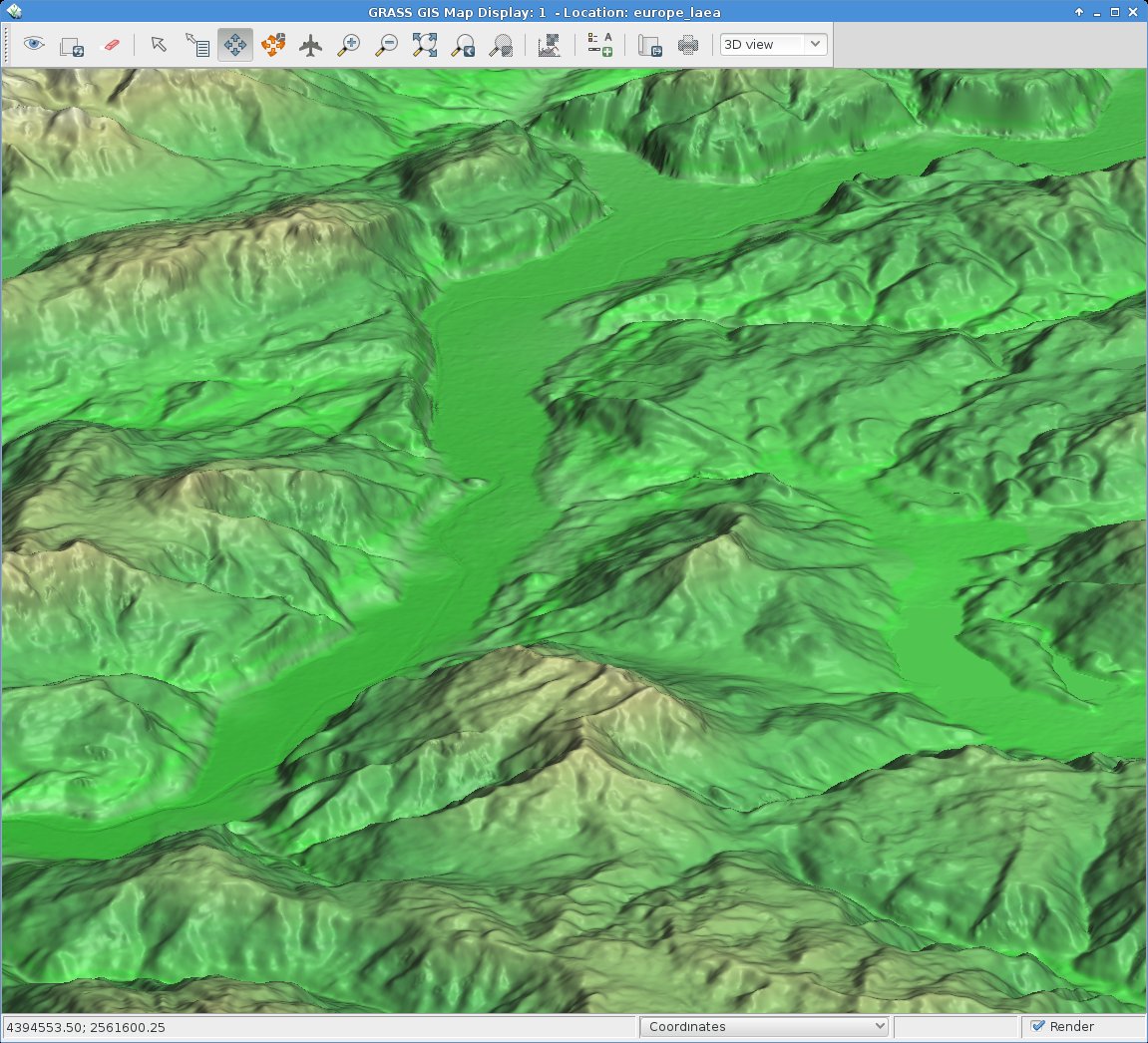
4. Visual LiDAR data exploration
Using the wxNVIZ 3D viewer, we can easily fly through the new DEM. Switch in the Map Display to “3D view” (1). Note that the default rendering is initially done at low visual resolution for speed reasons. You can switch to “Rotate mode” as well to easily navigate with the mouse. In the “Data” tab (2) you can increase the visual resolution (3) to obtain a crisp view:
https://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.png00Markushttps://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.pngMarkus2014-02-23 22:45:082023-11-20 16:35:14Importing and visualizing LAS LiDAR files in GRASS GIS 7: r.in.lidar
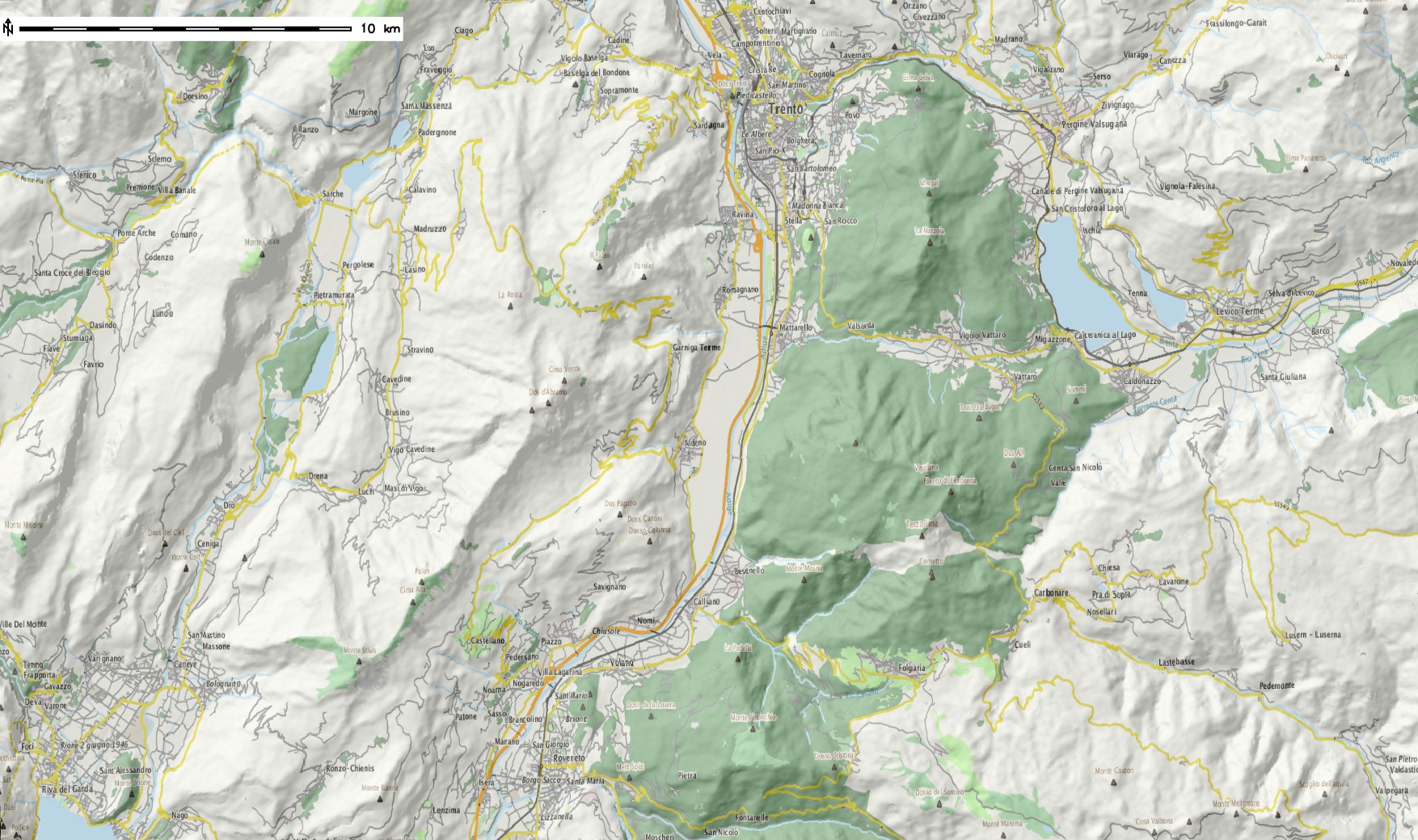
To warm up, I registered the “normally” shaded DEM (previously generated with gdaldem) with r.external in a GRASS GIS 7 location (EPSG 3035, LAEA) and overlayed the OpenStreetMap layer using WMS with GRASS 7’s r.in.wms. An easy task thanks to University of Heidelberg’s www.osm-wms.de. Indeed, they offer a similar shading via WMS, however, in the screenshot below you see the new EU data being used for controlling the light on our own:
OpenStreetMap shaded with EU DEM 25m (click to enlarge)
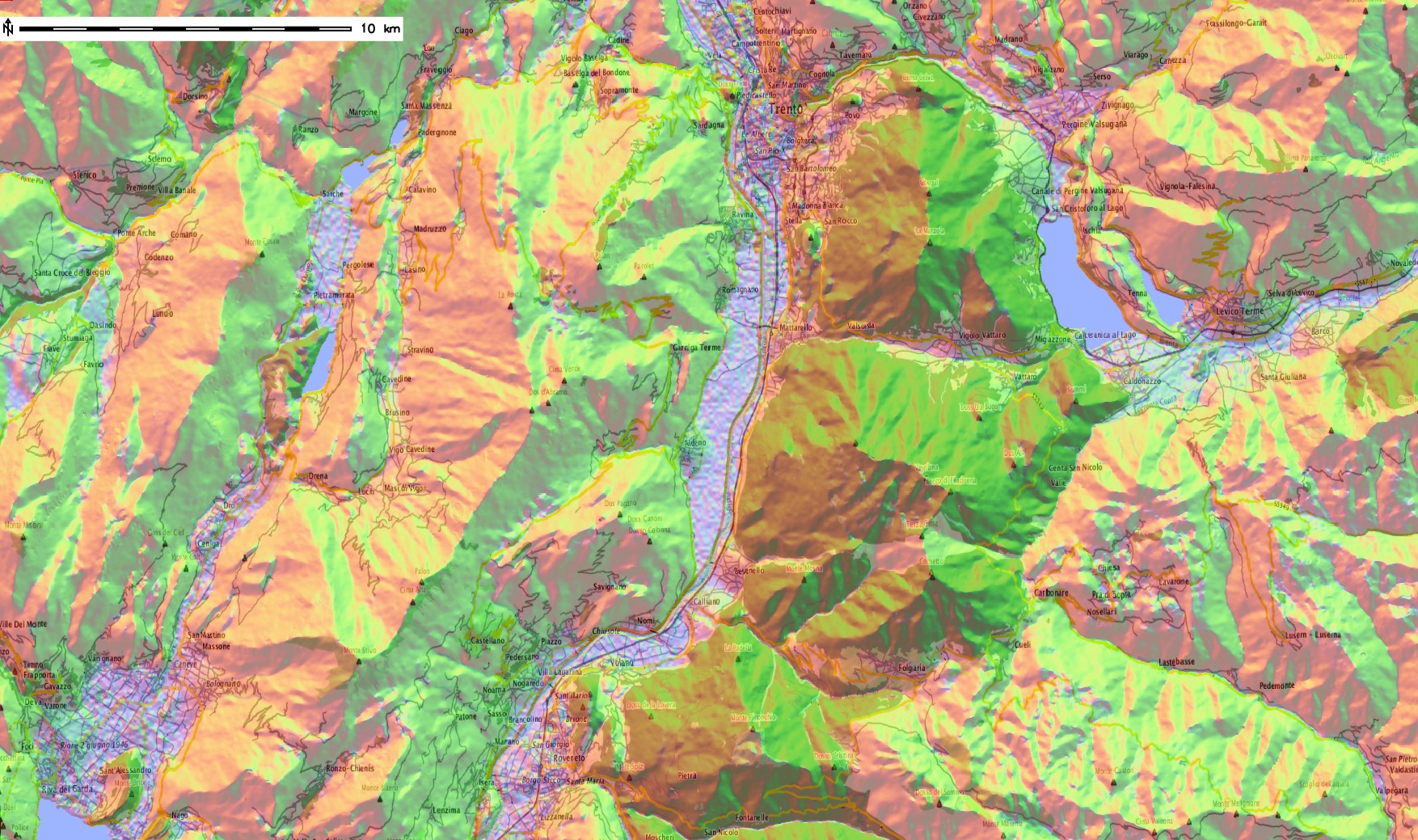
Next item: trying r.shaded.pca… It supports multi-core calculation and the possibility to strengthen the effects through z-rescaling. In my example, I used:
https://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.png00Markushttps://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.pngMarkus2013-12-15 00:34:052023-11-20 10:13:45Using the 25m EU-DEM for shading OpenStreetMap layers
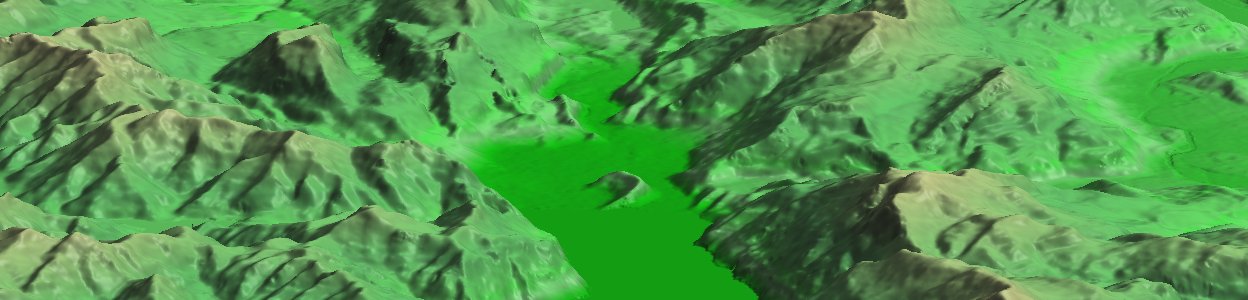
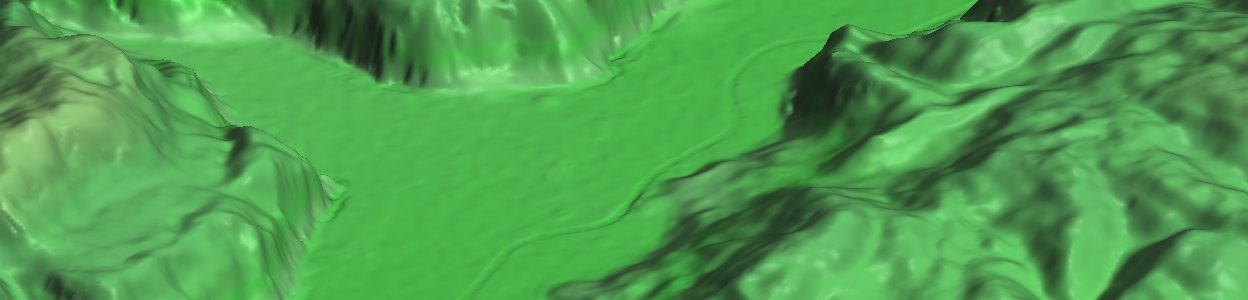
EU DEM 25m upper Garda Lake area with Riva del Garda and Arco (Italy). 3D view in wxNVIZ – GRASS GIS 7
The 25m European Digital Elevation Model (EU-DEM, Version 1) is a Digital Surface Model (DSM) representing the first surface as illuminated by the sensors:
EU DEM Rotaliana with Mezzocorona and S. Michele (Italy). Produced using Copernicus data and information funded by the European Union – EU-DEM layers.
Its elevations were captured at 1 arc second postings (2.78E-4 degrees). The tiles are provided at 25m resolution in EU-LAEA (EPSG. 3035) projection, temporal coverage: 2000, published in Oct 2013. It is a realisation of the Copernicus programme, managed by the European Commission, DG Enterprise and Industry. Metadata are provided here. According to their “Methodology” page it is a hybrid product based on SRTM and ASTER GDEM data fused by a weighted averaging approach and it has been generated as a contiguous dataset divided into 1 degree by 1 degree tiles, corresponding to the SRTM naming convention. In addition to the DEM data, a colour shaded relief image over Europe is provided.
From the metadata page: “The EU-DEM data are provided as is, i.e. without a formal validation yet. An independent statistical validation is scheduled as part of the GIO land monitoring service activities, and will be made available in the course of 2014.”
Data download
Note that the GeoTIFF files are of major size, up to 5 GB:
Hint for GRASS GIS users: instead of importing the data, you can use the r.external command to register the GeoTIFF DEM file instead of imorting it within a EU LAEA projected location.
https://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.png00Markushttps://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.pngMarkus2013-12-01 16:51:132023-11-20 16:44:50EU-DEM: new Digital Surface Model at 25m
The Landsat 8 mission is a collaboration between the U.S. Geological Survey (USGS) and National Aeronautics and Space Administration (NASA) which continues the acquisition of high-quality data for observing land use and land cover change.
The Landsat 8 spacecraft which was launched in 2013 carries they following key instruments:
OLI: the Operational Land Imager which collects data in the visible, near infrared, and shortwave infrared wavelength regions as well as a panchromatic band. With respect to Landsat 7 two new spectral bands have been added: a deep-blue band for coastal water and aerosol studies (band 1), and a band for cirrus cloud detection (band 9). Furthermore, a Quality Assurance band (BQA) is also included to indicate the presence of terrain shadowing, data artifacts, and clouds.
TIRS: The Thermal Infrared Sensor continues thermal imaging and is also intended to support emerging applications such as modeling evapotranspiration for monitoring water use consumption over irrigated lands.
The data from Landsat 8 are available for download at no charge and with no user restrictions.
Using the “Download options”, you can download the data set (requires login). Select the choice:
[x] Level 1 GeoTIFF Data Product (842.4 MB)
You will receive the file “LC80160352013134LGN03.tar.gz”.
Unpacking the downloaded Landsat 8 dataset
To unpack the data, run (or use a graphical tool at your choice):
tar xvfz LC80160352013134LGN03.tar.gz
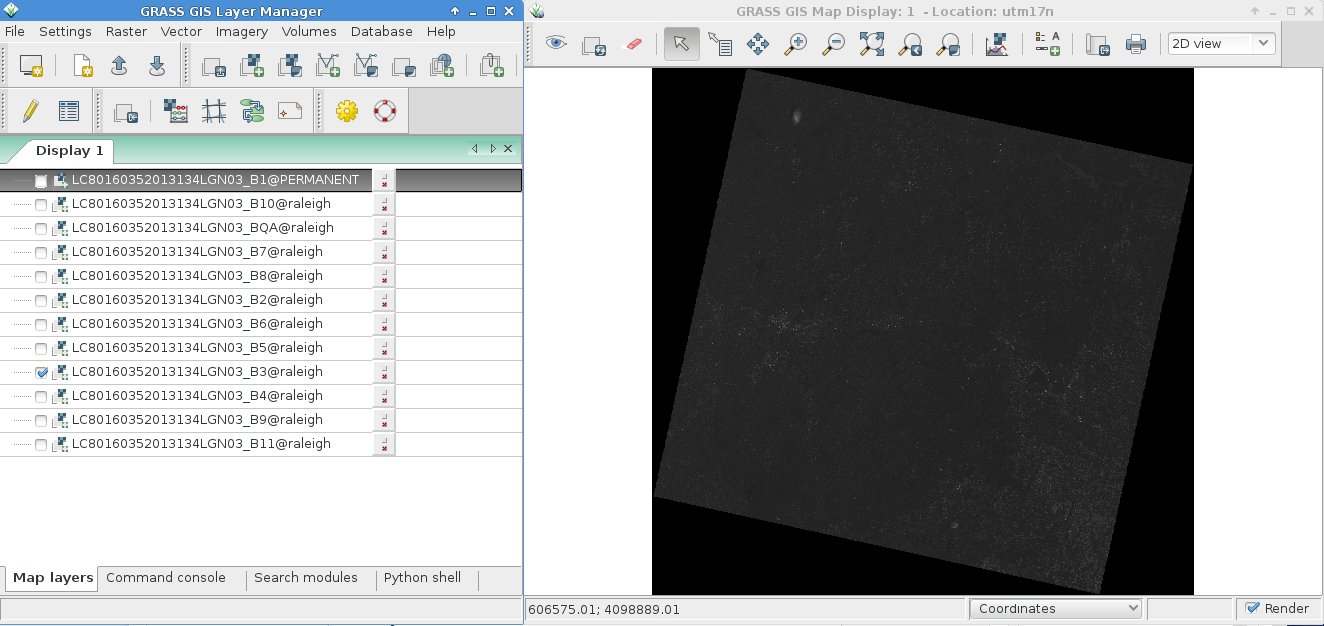
A series of GeoTIFF files will be extracted: LC80160352013134LGN03_B1.TIF, LC80160352013134LGN03_B2.TIF, LC80160352013134LGN03_B3.TIF, LC80160352013134LGN03_B4.TIF, LC80160352013134LGN03_B5.TIF, LC80160352013134LGN03_B6.TIF, LC80160352013134LGN03_B7.TIF, LC80160352013134LGN03_B8.TIF, LC80160352013134LGN03_B9.TIF, LC80160352013134LGN03_B10.TIF, LC80160352013134LGN03_B11.TIF, LC80160352013134LGN03_BQA.TIF
Note: While this Landsat 8 scene covers the area of the North Carolina (NC) sample dataset, it is delivered in UTM rather than the NC’s state plane metric projection. Hence we preprocess the data first in its original UTM projection prior to the reprojection to NC SPM.
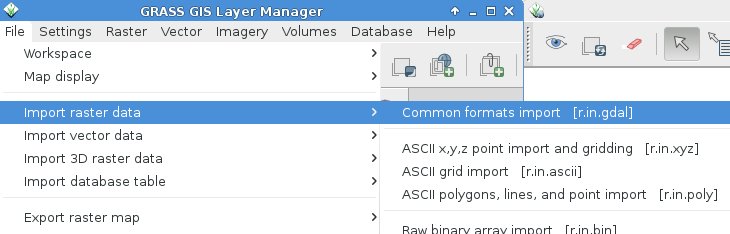
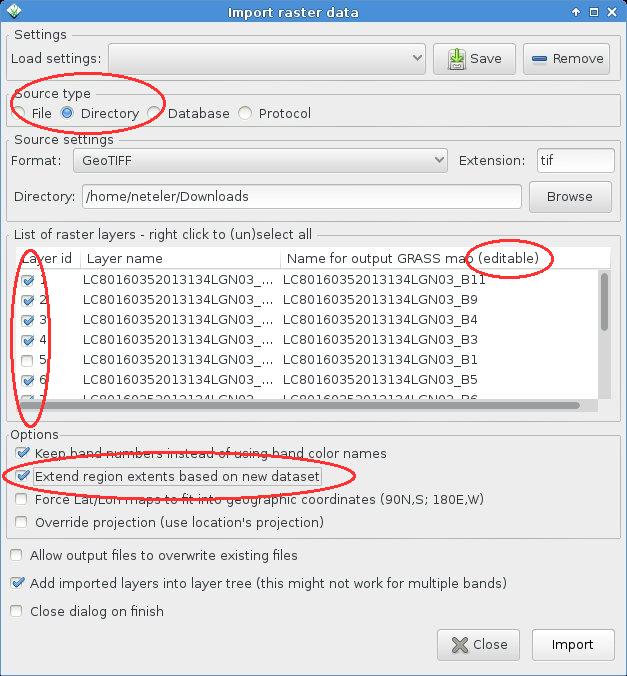
Using the Location Wizard, we can import the dataset easily into a new location (in case you don’t have UTM17N not already created earlier):
grass70 -gui
Now start GRASS GIS 7 and you will find the first band already imported (the others will follow shortly!).
For the lazy folks among us, we can also create a new GRASS GIS Location right away from the dataset on command line:
Landsat 8 Operational Land Imager (OLI) and Thermal Infrared Sensor (TIRS) images consist of nine spectral bands with a spatial resolution of 30 meters for Bands 1 to 7 and 9. New band 1 (ultra-blue) is useful for coastal and aerosol studies. New band 9 is useful for cirrus cloud detection. The resolution for Band 8 (panchromatic) is 15 meters. Thermal bands 10 and 11 are useful in providing more accurate surface temperatures and are collected at 100 meters. Approximate scene size is 170 km north-south by 183 km east-west (106 mi by 114 mi).
Landsat 7
Wavelength (micrometers)
Resolution (meters)
Landsat 8
Wavelength (micrometers)
Resolution (meters)
Band 1 – Coastal aerosol
0.43 – 0.45
30
Band 1 – Blue
0.45 – 0.52
30
Band 2 – Blue
0.45 – 0.51
30
Band 2 – Green
0.52 – 0.60
30
Band 3 – Green
0.53 – 0.59
30
Band 3 – Red
0.63 – 0.69
30
Band 4 – Red
0.64 – 0.67
30
Band 4 (NIR)
0.77 – 0.90
30
Band 5 – Near Infrared (NIR)
0.85 – 0.88
30
Band 5 (SWIR 1)
1.55 – 1.75
30
Band 6 – SWIR 1
1.57 – 1.65
30
Band 7 (SWIR 2)
2.09 – 2.35
30
Band 7 – SWIR 2
2.11 – 2.29
30
Band 8 – Panchromatic
0.52 – 0.90
15
Band 8 – Panchromatic
0.50 – 0.68
15
Band 9 – Cirrus
1.36- 1.38
30
Band 6 – Thermal Infrared (TIR)
10.40 -12.50
60* (30)
Band 10 – Thermal Infrared (TIRS) 1
10.60 – 11.19
100* (30)
Band 11 – Thermal Infrared (TIRS) 2
11.50- 12.51
100* (30)
* ETM+ Band 6 is acquired at 60-meter resolution. Products processed after February 25, 2010 are resampled to 30-meter pixels.
* TIRS bands are acquired at 100 meter resolution, but are resampled to 30 meter in delivered data product.
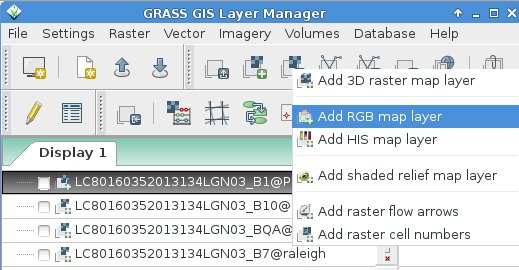
Natural color view (RGB composite)
Due to the introduction of a new “Cirrus” band (#1), the BGR bands are now 2, 3, and 4, respectively. See also “Common band combinations in RGB” for Landsat 7 or Landsat 5, and Landsat 8.
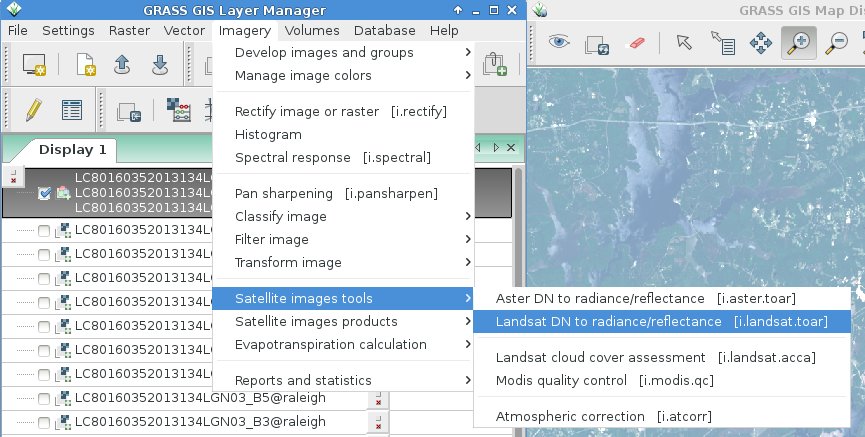
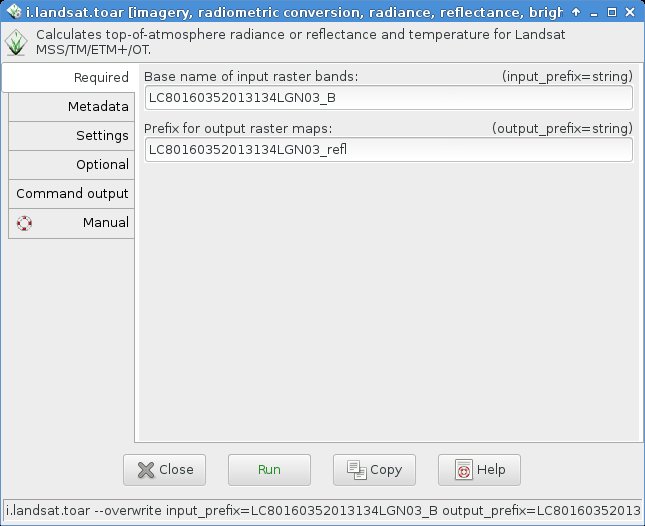
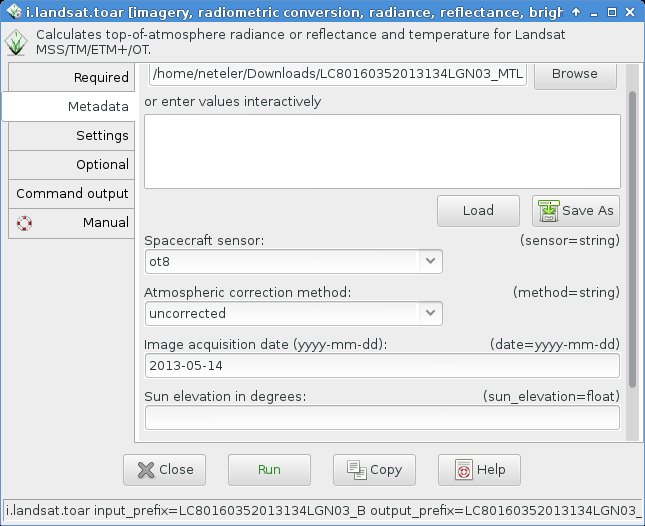
From Digital Numer (DN) to reflectance:
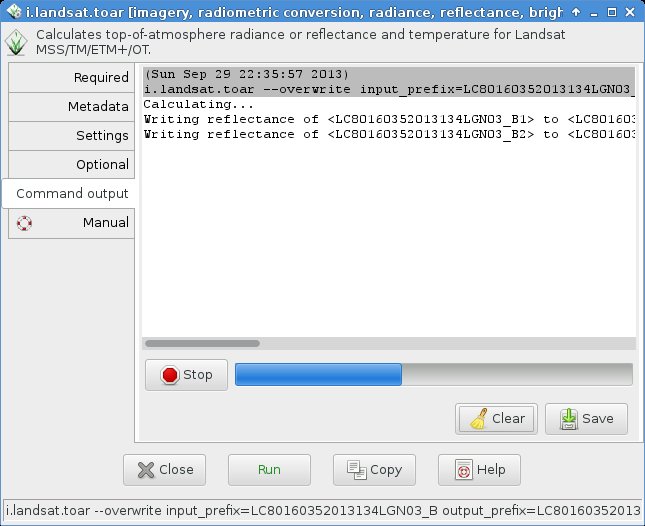
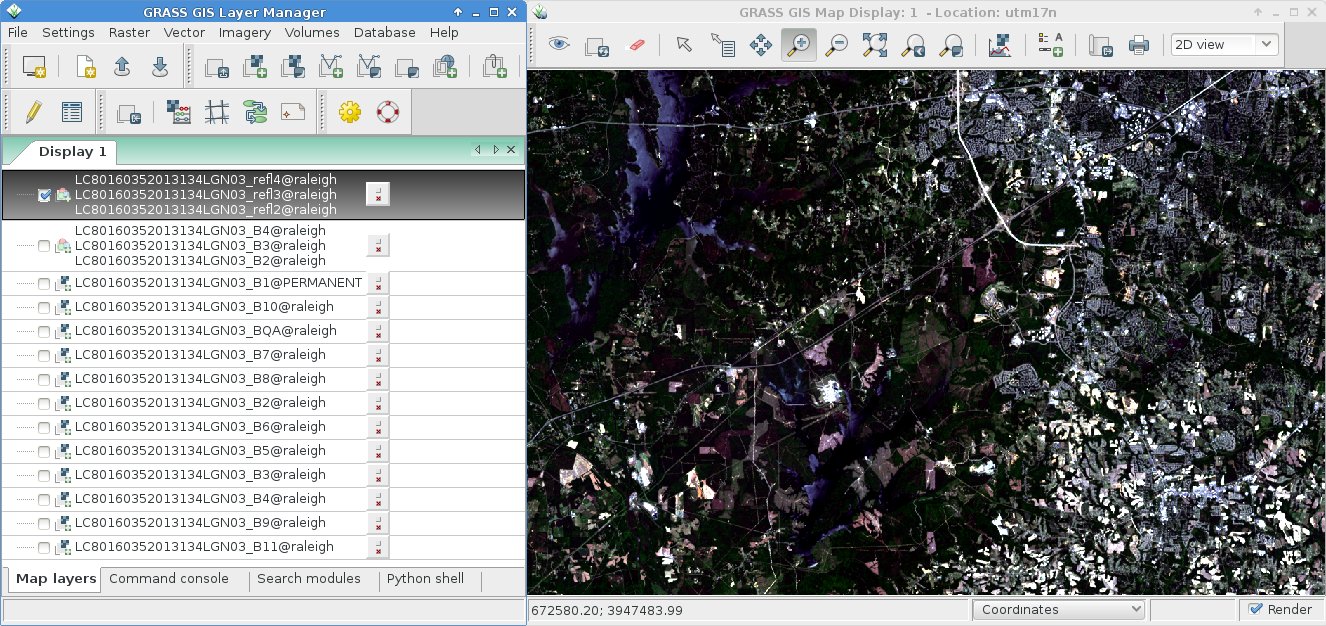
Before creating an RGB composite, it is important to convert the digital number data (DN) to reflectance (or optionally radiance). Otherwise the colors of a “natural” RGB composite do not look convincing but rather hazy (see background in the next screenshot). This conversion is easily done using the metadata file which is included in the data set with i.landsat.toar:
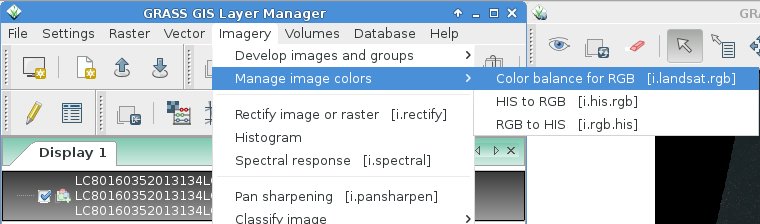
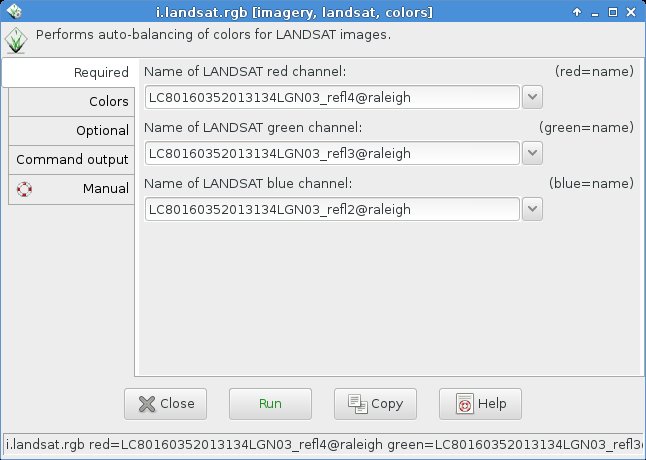
Now we are ready to create a nice RGB composite (hint 2015: i.landsat.rgb has been renamed to i.colors.enhance):
Select the bands to be visually combined:
… and voilà !
Applying the Landsat 8 Quality Assessment (QA) Band
One of the bands of a Landsat 8 scene is named “BQA” which contains for each pixel a decimal value representing a bit-packed combination of surface, atmosphere, and sensor conditions found during the overpass. It can be used to judge the overall usefulness of a given pixel.
We can use this information to easily eliminate e.g. cloud contaminated pixels. In short, the QA concept is (cited here from the USGS page):
For the single bits (0, 1, 2, and 3):
0 = No, this condition does not exist
1 = Yes, this condition exists.
The double bits (4-5, 6-7, 8-9, 10-11, 12-13, and 14-15) represent levels of confidence that a condition exists:
00 = Algorithm did not determine the status of this condition
01 = Algorithm has low confidence that this condition exists (0-33 percent confidence)
10 = Algorithm has medium confidence that this condition exists (34-66 percent confidence)
11 = Algorithm has high confidence that this condition exists (67-100 percent confidence).
Detailed bit patterns (d: double bits; s: single bits):
d – Bit 15 = 0 = cloudy
d – Bit 14 = 0 = cloudy
d – Bit 13 = 0 = not a cirrus cloud
d – Bit 12 = 0 = not a cirrus cloud
d – Bit 11 = 0 = not snow/ice
d – Bit 10 = 0 = not snow/ice
d – Bit 9 = 0 = not populated
d – Bit 8 = 0 = not populated
d – Bit 7 = 0 = not populated
d – Bit 6 = 0 = not populated
d – Bit 5 = 0 = not water
d – Bit 4 = 0 = not water
s – Bit 3 = 0 = not populated
s – Bit 2 = 0 = not terrain occluded
s – Bit 1 = 0 = not a dropped frame
s – Bit 0 = 0 = not fill
Usage example 1: Creating a mask from a bitpattern
We can create a cloud mask (bit 15+14 are set) from this pattern:
cloud: 1100000000000000
Using the Python shell tab, we can easily convert this into the corresponding decimal number for r.mapcalc:
Welcome to wxGUI Interactive Python Shell 0.9.8
Type "help(grass)" for more GRASS scripting related information.
Type "AddLayer()" to add raster or vector to the layer tree.
Python 2.7.5 (default, Aug 22 2013, 09:31:58)
[GCC 4.8.1 20130603 (Red Hat 4.8.1-1)] on linux2
Type "help", "copyright", "credits" or "license" for more information.
>>> int(0b1100000000000000)
49152
Using this decimal value of 49152, we can create a cloud mask:
# set NULL for cloudy pixels, 1 elsewhere:
r.mapcalc "cloudmask = if(LC80160352013134LGN03_BQA == 49152, null(), 1 )"
# apply this mask
r.mask cloudmask
In our sample scene, there are only tiny clouds in the north-east, so no much to be seen. Some spurious cloud pixels are scattered over the scene, too, which could be eliminated (in case of false positives) or kept.
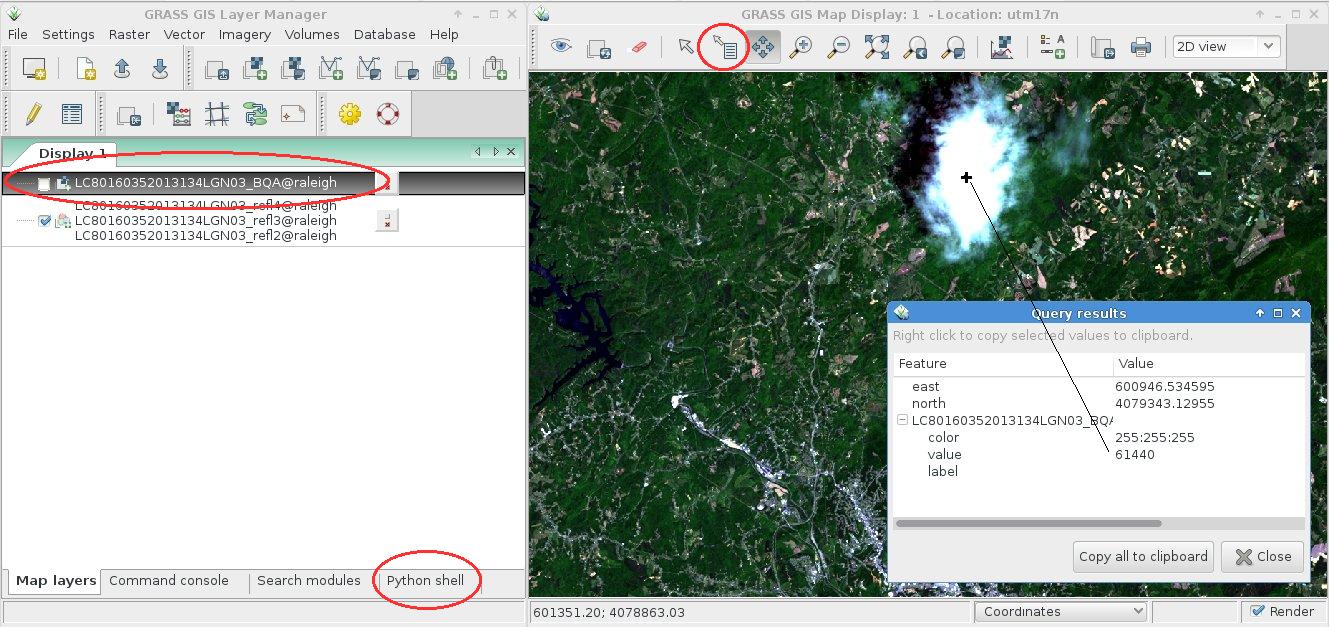
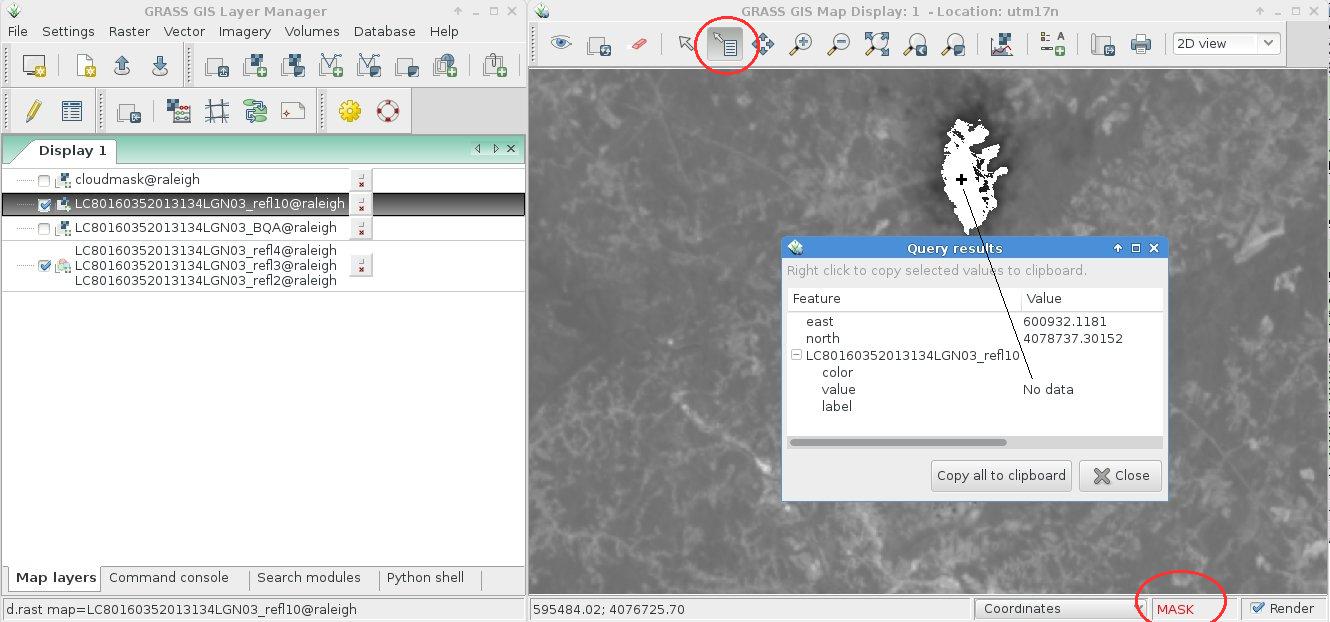
Usage example 2: Querying the Landsat 8 BQA map and retrieve the bitpattern
Perhaps you prefer to query the BQA map itself (overlay the previously created RGB composite and query the BSA map by selecting it in the Layer Manager). In our example, we query the BQA value of the cloud:
Using again the Python shell tab, we can easily convert the decimal number (used for r.mapcalc) into the corresponding binary representation to verify with the table values above.
Hence, bits 15,14,13, and 12 are set: cloudy and not a cirrus cloud. Looking at the RGB composite we tend to agree :-) Time to mask out the cloud!
wxGUI menu >> Raster >> Mask [r.mask]
Or use the command line, as shown already above:
# remove existing mask (if active)
r.mask -r
# set NULL for cloudy pixels, 1 elsewhere:
r.mapcalc "cloudmask = if(LC80160352013134LGN03_BQA == 61440, null(), 1 )" --o
# apply the new mask
r.mask cloudmask
The visual effect in the RGB composite is minimal since the cloud is white anyway (as NULL cells, too). However, it is relevant for real calculations such as NDVI (vegetation index) or thermal maps.
We observe dark pixels around the cloud originating from thin clouds. In a subsequent identification/mask step we may eliminate also those pixels with a subsequent filter.
https://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.png00Markushttps://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.pngMarkus2013-09-29 23:35:012023-11-20 16:46:07Processing Landsat 8 data in GRASS GIS 7: Import and visualization
“Although the USGS does not have detailed records since the mission’s inception in 1972, there is good evidence that more data have been distributed in the last 6 months than in the entire first 36 years of the Landsat missions combined.”
Amazing, no? Don’t have to say more when blinking at EU data sources…
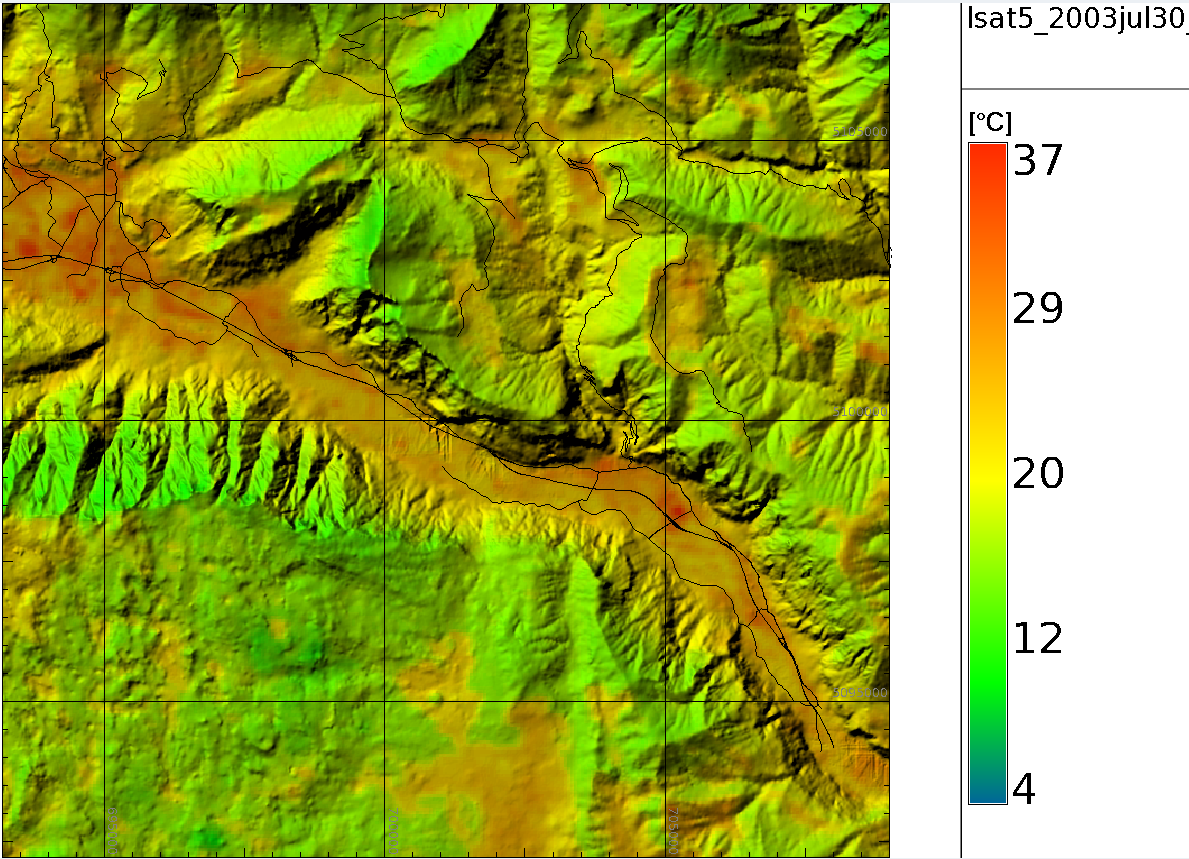
Thermal map of Valsugana near Trento, Italy (30 July 2003, ~ 9:30)
The recent publication of the ASTER GDEM (30m) is a great step towards a worldwide high resolution elevation model. I have done some test in the Southern Alps around Trento which is among the most complex terrains in Europe. The scope was to calculate a difference map to the local high resolution DEM.
The steps
1. Mosaicking and reprojection to UTM32/WGS84 of ASTER GDEM tiles of the area (using gdalwarp). 2. Import of the ASTER GDEM map into GRASS (r.in.gdal) 3. Creation of a difference map to the provincial DEM (r.mapcalc, r.colors) 4. Histogram and univariate statistics (d.histogram, r.univar)
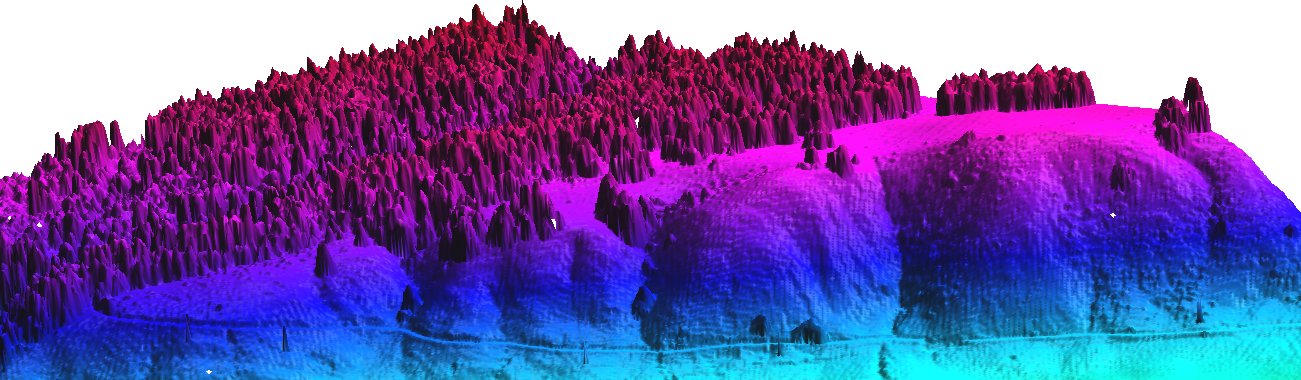
The results (click for higher resolution or download slides as PDF):
Comments
The hydrological pattern appears to coincide with the provincial rivers map. It can be seen that lakes weren’t masked during the ASTER DEM preparation, howver, these could be identified for many areas in the world with OpenStreetMap layers. Despite spikes (including unexpected craters), the overall quality appears to be acceptable for this first version of ASTER GDEM – the standard deviation is 18m for the test area with outliers predominantely found in the areas of complex terrain rather than in the valley floors. A shift of -2.3m is also observed (reprojection artifact?). It will be worth to check if SRTM data (90m) could help to identify and remove the spikes from the DEM. More hopefully in the near future…
Acknowledgments: ASTER GDEM is a product of METI and NASA.
The second command is opening file_merged.shp in update mode, and trying to find existing layers and append the features being copied. The -nln option sets the name of the layer to be copied to.
Vector map reprojection
We reproject from the source projection (as defined in .prj file) to WGS84/LL:
MAP0: Extract spatial subregion, reproject from NAD83 to WGS84
# coordinate order: W S E N
ogr2ogr -spat 19.95035 -26.94755 29.42989 -17.72624 -t_srs ‘EPSG:4326’ \
polbnda_botswana.shp gltp:/vrf/grass0/warmerdam/v0soa/vmaplv0/soamafr \
‘polbnda@bnd(*)_area’
OGR and SQL
Sample ‘where’ statements (use -sql for PostgreSQL driver):
# -where ‘fac_id in (195,196)’
# -where ‘fac_id = 195’
ogrinfo -ro -where ‘fac_id in (195,196)’ \
gltp:/vrf/grass0/warmerdam/v0soa/vmaplv0/soamafr ‘polbnda@bnd(*)_area’
Convert GRASS 6 vector map to SHAPE (needs GDAL-OGR-GRASS plugin):
# -nln is “new layer name” for the result:
ogr2ogr archsites.shp grassdata/spearfish60/PERMANENT/vector/archsites/head 1 \
-nln archsites
Using WKT files with ogr2ogr
The definition is in ESRI WKT format. If you save it to a text file called out.wkt you can do the following in a translation to reproject input latlong points to this coordinate system:
Most comand line options for GDAL/OGR tools that accept a coordinate system will allow you to give the name of a file containing WKT. And if you prefix the filename with ESRI:: the library will interprete the WKT as being ESRI WKT and convert to “standard” format accordingly. The -s_srs switch is assigning a source coordinate system to your input data (in case it didn’t have this properly defined already), and the -t_srs is defining a target coordinate system to reproject to.
TIGER files in OGR
# linear features:
ogr2ogr tiger_lines.shp tgr46081.rt1 CompleteChain
# area features:
export PYTHONPATH=/usr/local/lib/python2.5/site-packages
tigerpoly.py tgr46081.rt1 tiger_area.shp
OGR CSV driver: easily indicate column types
You can now write a little csv help file to indicate the columns types to OGR. It works as follows. Suppose you have a foobar.csv file that looks like this:
https://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.png00Markushttps://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.pngMarkus2008-06-28 14:31:002023-10-22 18:44:31OGR vector data tips and tricks
Fast image display with tiling
If you want fast access you might want to try converting e.g. a BIL files to a tiled TIFF, and build overviews. You can build overviews for BIL too, but it can’t be directly tiled:
GDAL performance problem?
GDAL_CACHEMAX is normally a number of megabytes (default is 10 or so). So something like:
gdal_translate -of GTIFF -co TILED=YES –config GDAL_CACHEMAX 120 madison_1f_01.jpg madison_1f_01.tif
would use a 120MB cache.
GDAL and 1 bit maps
With a trick you can get those:
gdal_merge.py -co NBITS=1 -o dst.tif src.tif
Generate 8 bit maps for Mapserver
gdal_translate -scale in.tif out.tif
Note: As of MapServer 4.4 support has been added for classifying non-8bit raster inputs
Greyscale conversion
A “proper” conversion would involve a colorspace transformation on the RGB image into IHS or something like that, and then taking the intensity. GRASS can do things like that.
Generate an OGC WKT (SRS)
In WKT the ellipsoid is described by two parameters: the semi-major axis and the inverse flattening. For a sphere the flattening is 0 and so the inverse flattening is infinity.
Extracting spatial subset (subregion)
W N E S
gdal_translate -of GTiff -projwin 636861 5152686 745617 5054047.5 \
p192r28_5t19920809_nn1.tif test1_utm.tif
Fixing broken projection/datum info for raster data
gdal_translate -of HFA -a_srs epsg:32735 /cdrom/173072lsat.img \
173072lsat_fixed.img
# or, using a WKT file
gdal_translate -of HFA -a_srs file.prj /cdrom/173072lsat.img \
173072lsat_fixed.img
Merge various import maps, re-project on the fly and extract spatial subset according to current GRASS region
eval `g.region -g`
gdalwarp -te $w $s $e $n *.TIF \
srtm_cgiar3_italy_north_LL.tif
Export to (limited) TIFF readers such as ArcView, or ImageMagick
Many tools have trouble reading multi-band TIFFs with “band interleaving”, the GDAL output default. Best is to use the INTERLEAVE=PIXEL creation option. Just add to the gdal_translate command line:
-co INTERLEAVE=PIXEL
Reprojecting external map to current GRASS location externally
gdalwarp -t_srs “`g.proj -wf`” aster.tif aster_tmerc.tif
Cut out region of interest with gdalwarp (in target coords)
Add to command line (insert values instead of letters of course:
#damn order, differs from -projwin!!
-te W S E N
Merging many small adjacent DEMs into one big map (A)
This needs GDAL compiled with Python and numpy installed:
# if not installed in standard site-packages directory
export PYTHONPATH=/usr/local/lib/python2.5/site-packages
gdal_merge.py -v -o spearfishdem.tif -n “-32768” d*.tif
Merging many small adjacent DEMs into one big map (B)
Even easier, just use gdalwarp:
gdalwarp C_1mX1m/dtm*.tif big.tif
Or just a few tiles:
gdalwarp C_1mX1m/dtm0010[4-5]* big_selection.tif
Merge various map/bands into a RGB composite
gdal_merge.py -of HFA -separate band1.img band2.img band3.img -o out.img
GDAL gdalwarp interpolation comments
Which method -rn, rb, -rc or -rcs should one use for DEM and which for data like e.g. Landsat TM reprojecting?
-tps: Enable use of thin plate spline transformer based on available GCPs.
-rn: Use nearest neighbour resampling (default, fastest algorithm, worst interpolation quality).
-rb: Use bilinear resampling.
-rc: Use cubic resampling.
-rcs: Use cubic spline resampling (slowest algorithm).
FrankW suggests: I would suggest -rb for DEMs, and one of the cubic kernels for landsat data. Of course, there are various factors that you should take into account. Using -rb (bilinear) for the DEM will perform local averaging of the nearby pixel values in the source. This give reasonable results without introducing any risky “overshoot” effects you might see with cubic that could be disturbing for analysis or visualization in a DEM. The cubic should in theory do better at preserving edges and general visual crispness than using bilinar or nearest neighbour. However, if you are wanting to do analysis with the landsat (such as multispectral classification) I would suggest just using -rn (nearest neighbour) so as to avoid causing odd effects to the spectral values. Nobody can’t tell you what method should be used in your case. Generally speaking, in the case of upsampling spline and cubic interpolators are more suitable (-rcs and -rc). In the case of downsampling and the same resolution it is completely up to you what method looks better. Just try them all and select the one which is most appropriate for you.
Geocoding with ‘gdal_translate’ FrankW suggests: As far as I know there is not on-screen method for doing this, but it certainly isn’t too difficult with a little bit of semi-manual work. Open two OpenEV views, one with the unreferenced image, one with the geo-reference base you want to use. Move your cursor over the non-referenced one (let’s call it image1), record (read: write down!) the pixel x,y values. Then look at the same location in image2. Write down the geocoordinate for the pixel. You should have four numbers for each location you want to pin the image to. And so on and so on. Then use gdal_translate to translate image1.tif to image1_georefd.tif but adding the -GCP parameter for each set of coordinates. Like so…
To select a channel and warp to UTM (or whatever is inside):
gdalwarp HDF4_SDS:ASTER_L1B:”pg-PR1B0000-2002031402_100_001″:2 aster_2.tif
gdalinfo aster_2.tif
https://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.png00Markushttps://neteler.org/wp-content/uploads/2024/01/wg_neteler_logo.pngMarkus2008-06-28 13:57:002023-11-11 21:37:16GDAL raster data tips and tricks










")