Today marks 35 years of GRASS GIS development – with frequent releases the project keeps pushing the limits in terms of geospatial data processing quality and performance.

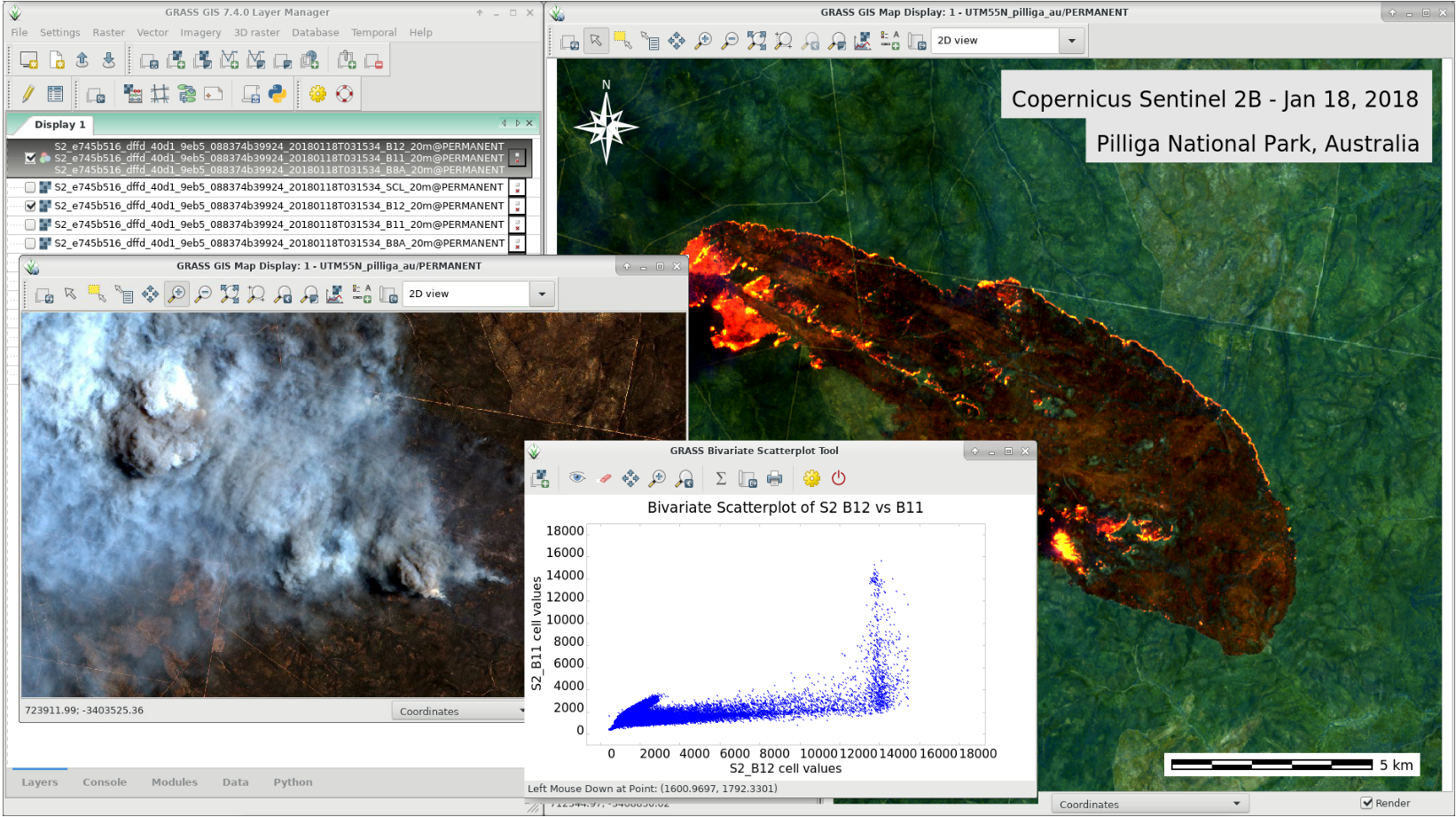
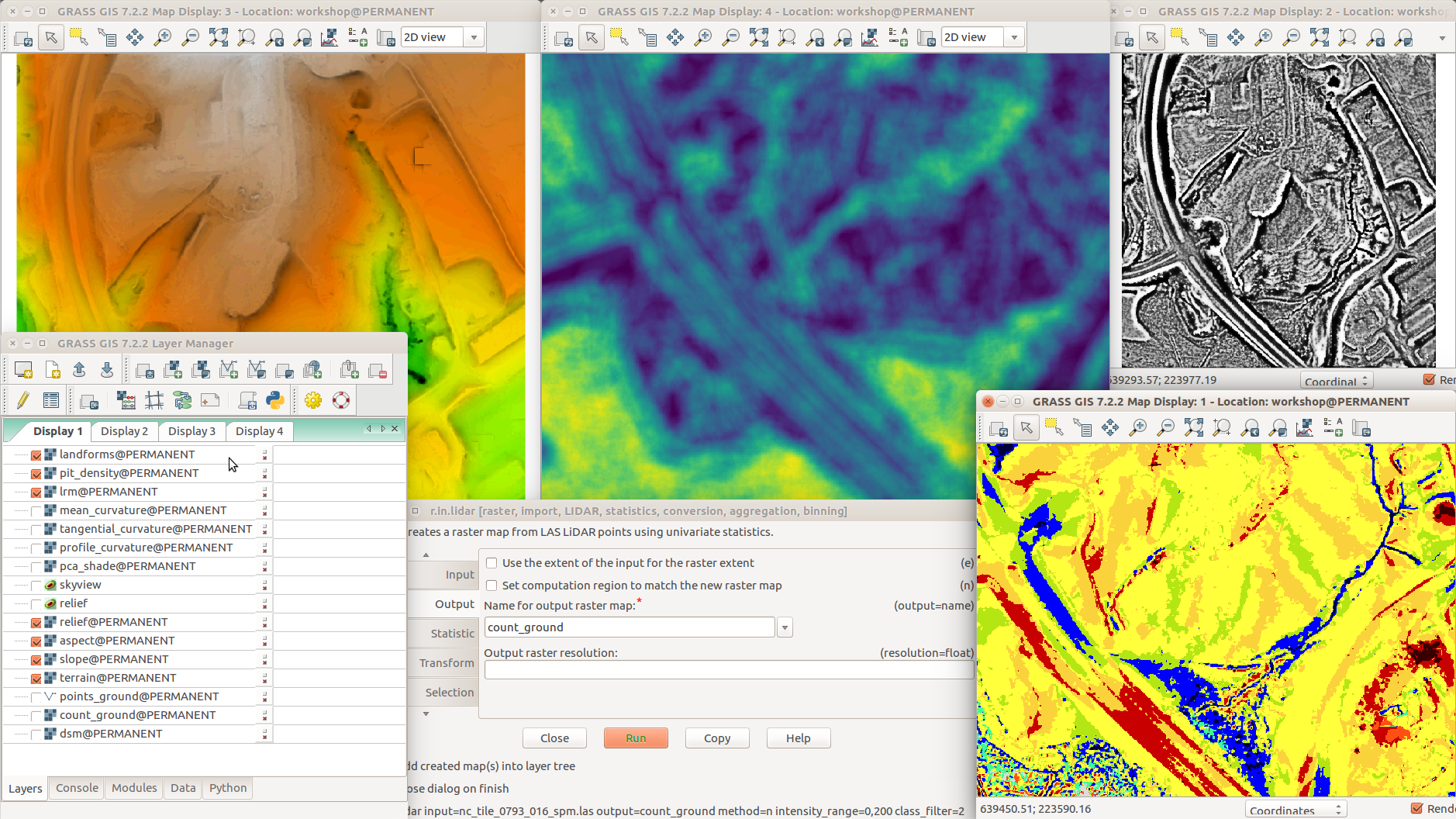
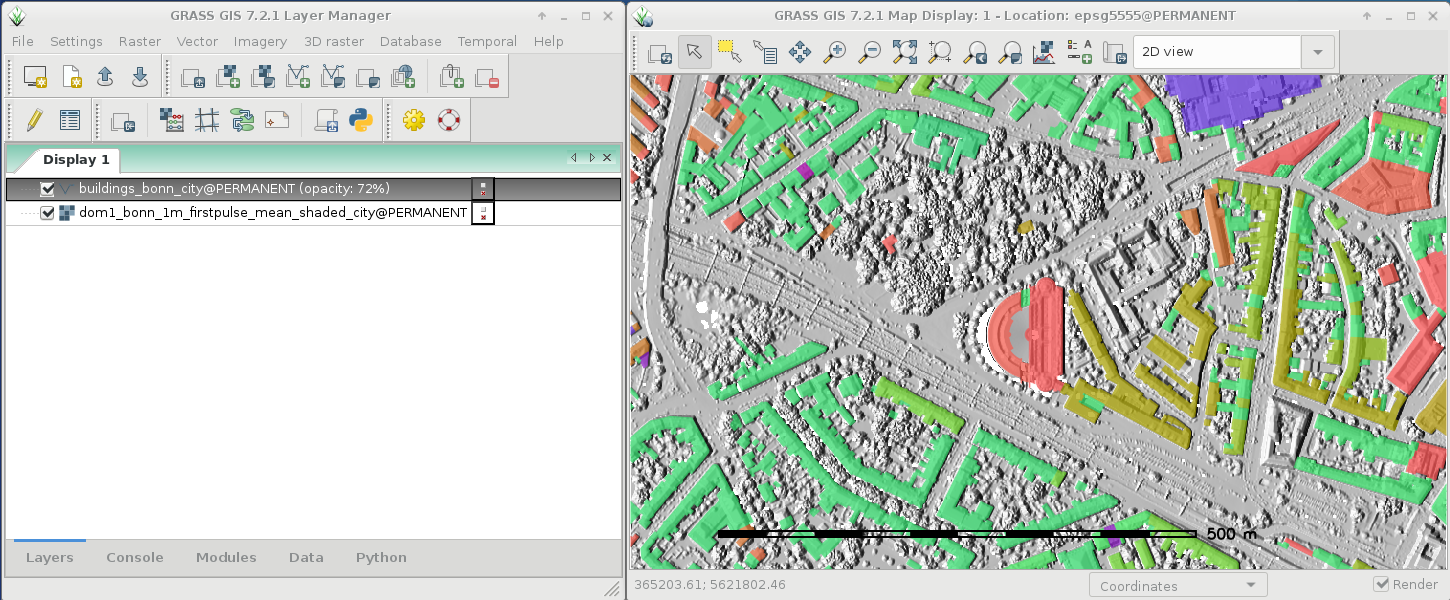
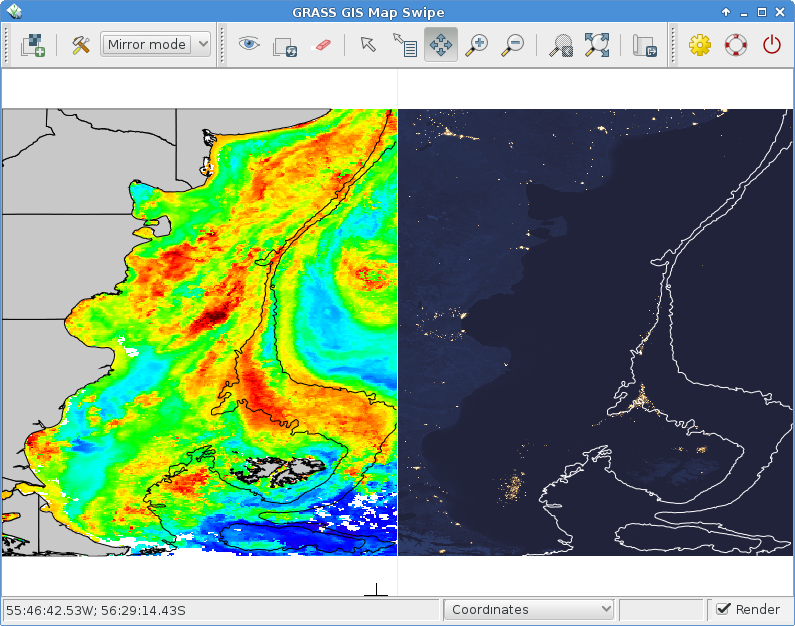
GRASS (Geographic Resources Analysis Support System) is a free and open source Geographic Information System (GIS) software suite used for geospatial data management and analysis, image processing, graphics and map production, spatial modeling, and 3D visualization. Since the major GRASS GIS 7 version, it also comes with a feature rich engine for space-time cubes useful for time series processing of Landsat and Copernicus Sentinel satellite data and more. GRASS GIS can be either used as a desktop application or as a backend for other software packages such as QGIS and R. Furthermore, it is frequently used on HPC and cloud infrastructures for massive parallelized data processing.
Brief history
In 1982, under the direction of Bill Goran at the U.S. Army Corps of Engineers Construction Engineering Research Laboratory (CERL), two GIS development efforts were undertaken. First, Lloyd Van Warren, a University of Illinois engineering student, began development on a new computer program that allowed analysis of mapped data. Second, Jim Westervelt (CERL) developed a GIS package called “LAGRID – the Landscape Architecture Gridcell analysis system” as his master’s thesis. Thirty five years ago, on 29 July 1983, the user manual for this new system titled “GIS Version 1 Reference Manual” was first published by J. Westervelt and M. O’Shea. With the technical guidance of Michael Shapiro (CERL), the software continued its development at the U.S. Army Corps of Engineers Construction Engineering Research Laboratory (USA/CERL) in Champaign, Illinois; and after further expansion version 1.0 was released in 1985 under the name Geographic Resources Analysis Support System (GRASS). The GRASS GIS community was established the same year with the first annual user meeting and the launch of GRASSnet, one of the internet’s early mailing lists. The user community expanded to a larger audience in 1991 with the “Grasshopper” mailing list and the introduction of the World Wide Web. The users’ and programmers’ mailing lists archives for these early years are still available online.
In the mid 1990s the development transferred from USA/CERL to The Open GRASS Consortium (a group who would later generalize to become today’s Open Geospatial Consortium — the OGC). The project coordination eventually shifted to the international development team made up of governmental and academic researchers and university scientists. Reflecting this shift to a project run by the users, for the users, in 1999 GRASS GIS was released under the terms of the GNU General Public License (GPL). A detailed history of GRASS GIS can be found at https://grass.osgeo.org/
Where to next?
The development on GRASS GIS continues with more energy and interest than ever. Parallel to the long-term maintenance of the GRASS 7.4 stable series, effort is well underway on the new upcoming cutting-edge 7.6 release, which will bring many new features, enhancements, and cleanups. As in the past, the GRASS GIS community is open to any contribution, be it in the form of programming, documentation, testing, and financial sponsorship. Please contact us!
About GRASS GIS
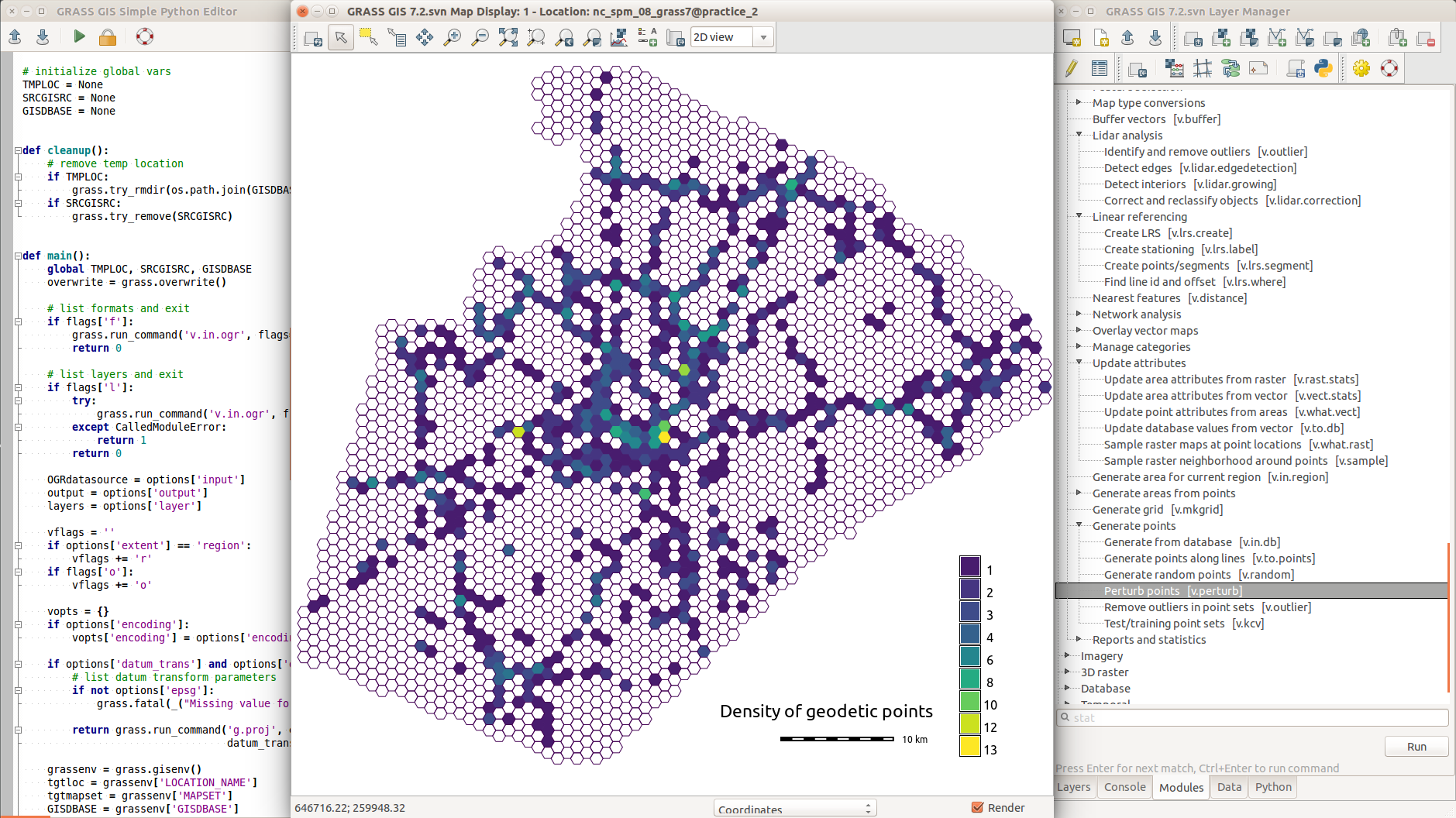
The Geographic Resources Analysis Support System (https://grass.osgeo.org/), commonly referred to as GRASS GIS, is an Open Source Geographic Information System providing powerful raster, vector and geospatial processing capabilities in a single integrated software suite. GRASS GIS includes tools for spatial modeling, visualization of raster and vector data, management and analysis of geospatial data, and the processing of satellite and aerial imagery. It also provides the capability to produce sophisticated presentation graphics and hardcopy maps. GRASS GIS has been translated into about twenty languages and supports a huge array of data formats. It can be used either as a stand-alone application or as backend for other software packages such as QGIS and R geostatistics. It is distributed freely under the terms of the GNU General Public License (GPL). GRASS GIS is a founding member of the Open Source Geospatial Foundation (OSGeo).
The GRASS Development Team, July 2018