Watch how the community based GRASS GIS 6.4 software development evolved! You can see how the individual contributors modify and expand the source code – click screenshot for Youtube video:
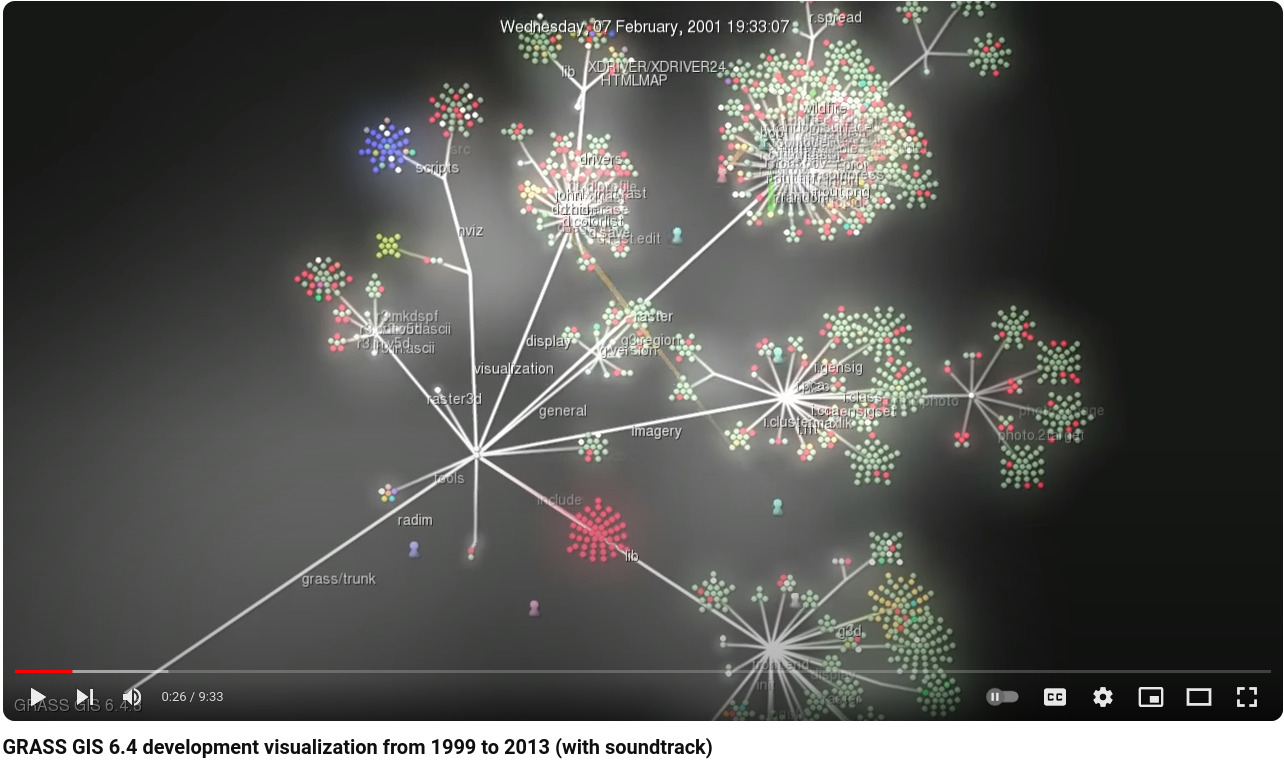
- Dec 29, 1999: GRASS GIS 5.0 is being stored in an online source code repository in December 1999…
- Dec 02, 2000: The developers work on all parts of the code…
- Jan 15, 2002: Working on the future GRASS GIS 5.1 release
- Nov 25, 2002: Starting GRASS 5.1 development with code restructuring
- Jun 14, 2004: GRASS GIS 5.7 released in June 2004
- Nov 09, 2004: Source code restructuring to get a better directory layout (all other developers waiting…)
- Nov 09, 2004: … thousands of files are modified in this operation …
- Nov 10, 2004: All developers resume their activities after the restructuring
- Jan 10, 2005: Preparing the GRASS GIS 6.0.0 release…
- Apr 09, 2005: GRASS GIS 6.0.0 published, release branch being split off from trunk for easier maintenance
- Feb 22, 2006: Release of GRASS GIS 6.0.2 and new source code refactoring startedApr 05, 2006: Heavy development activity in trunk (development branch) …
- Oct 25, 2006: GRASS GIS 6.2.0 released in October 2006
- Apr 10, 2007: Preparing the GRASS GIS 6.2.2 release…
- Jun 16, 2007: GRASS GIS 6.2.2 released in June 2007
- Nov 01, 2007: Raster and vector modules being actively maintained…
- Apr 02, 2007: New graphical user interface development speeding up (wxGUI)
- Feb 20, 2008: Copyright statements prettified in many files
- May 31, 2008: New GRASS 6 development branch being split off from trunk (which becomes GRASS 7)
- Jun 10, 2008: Developers moving over to new branch
- Feb 23, 2009: GRASS 6.4 release branch split off from GRASS 6 development branch
- Apr 03, 2009: GRASS GIS 6.4 preparations starting…
- Feb 24, 2010: Intense maintenance in GRASS 6.4 release branch
- Sep 15, 2010: GRASS GIS 6.4.0 released in September 2010
- Apr 12, 2011: GRASS GIS 6.4.1 released in April 2011
- Jun 27, 2011: GRASS GIS 6.4.svn matures for the upcoming 6.4.2 release
- Aug 16, 2011: Intense maintenance in GRASS 6.4 release branch (GRASS GIS 7 development not shown here)…
- Feb 19, 2012: GRASS GIS 6.4.2 released in February 2012
- Nov 13, 2012: Backporting graphical user interface bugfixes from GRASS GIS 7 to GRASS GIS 6.4
- Apr 17, 2013: Further maintenance in GRASS 6.4 release branch
- Jul 10, 2013: Fixing odds ‘n ends for the new stable release
- Jul 27, 2013: GRASS GIS 6.4.3 released in July 2013
The corresponding timeline is also available at
https://grass.osgeo.org/home/history/releases/
THANKS TO ALL CONTRIBUTORS!
https://grass.osgeo.org/development/
Rendering: Markus Neteler
Audio track editing: Duccio Rocchini & Antonio Galea
Music:
Le bruit peut rendre sourd – Track 6/18 Album “Sensation electronique” by Saelynh (CC-BY-NC-ND) https://www.jamendo.com/en/track/1236/le-bruit-peut-rendre-sourd
Software used:
Gource software: https://code.google.com/p/gource/ (GPL)
OpenShot video editor: https://www.openshotvideo.com/ (GPL